

Desert Eye: Military Surveillance Robot
By Aviv Butvinik
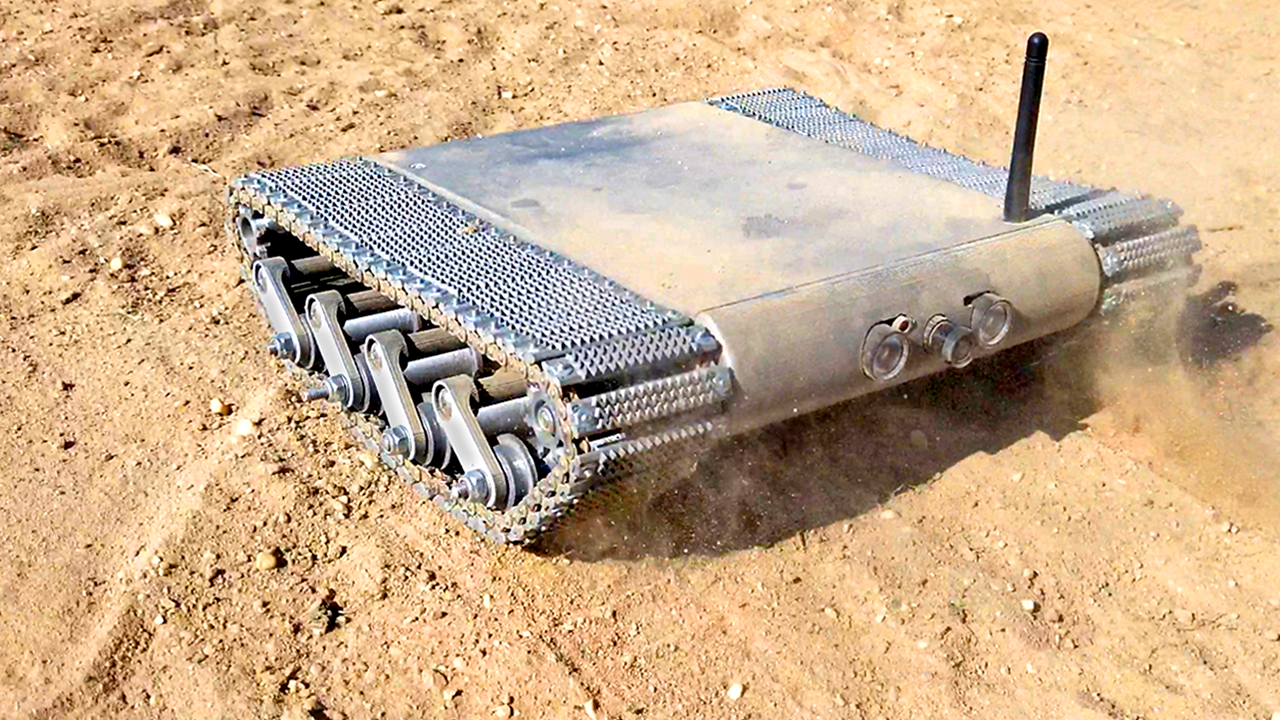
Desert Eye is a mobile, military surveillance robot that can traverse the desert environment and wirelessly stream video regarding enemy locations to a mobile device via its articulating arm mounted night-vision zoom camera.
Type: Commercial, Education
Website: https://youtube.com/playlist?list=PLVeHTh_jKND-327KAO2POTp0JrTHwv22A

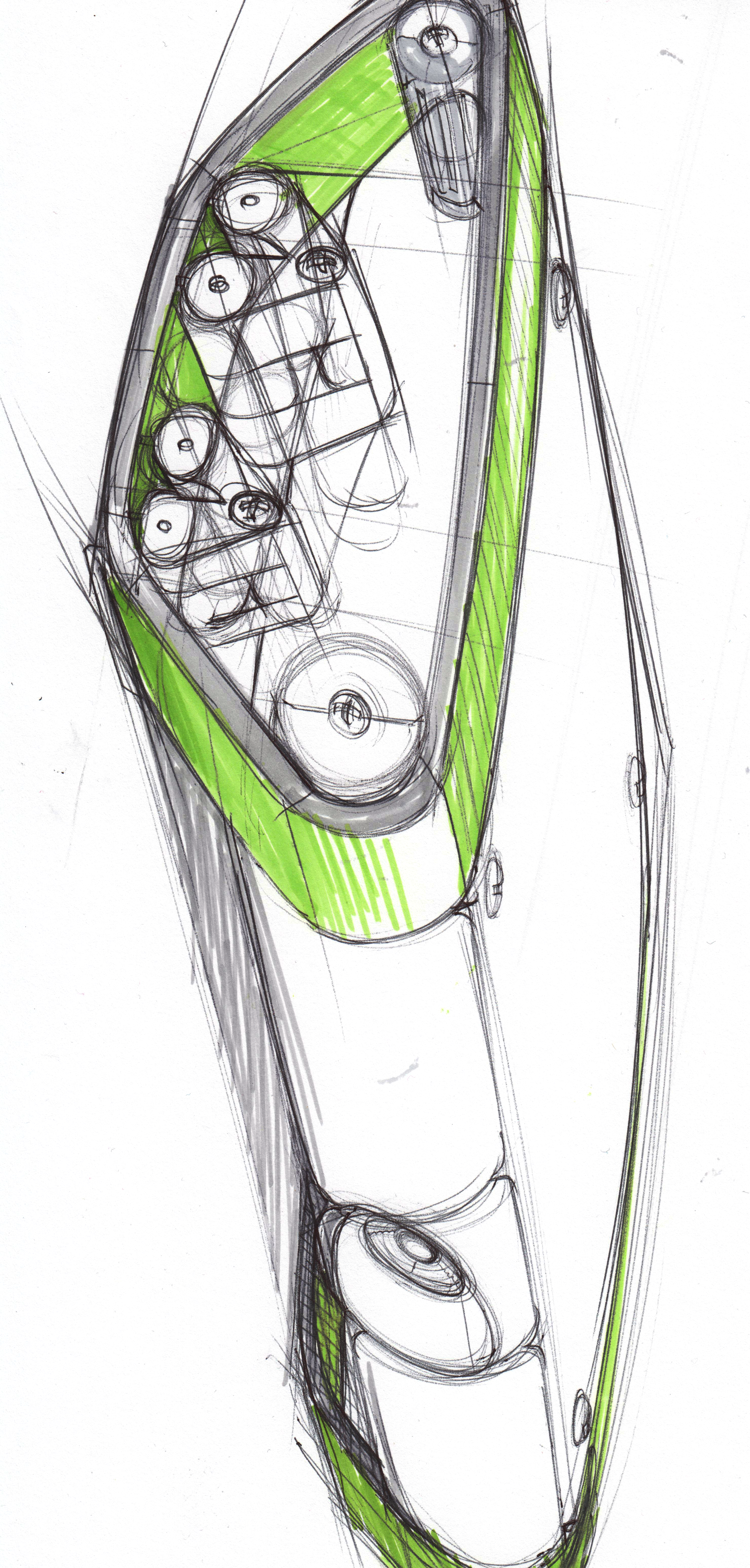
About them: Hi, my name is Aviv!I have a bachelor's degree in industrial design and boundless interest in robotics. The result is a creative process that begins with design sketches, continues with rapid prototyping, and ultimately ends with injection molding and metal fabrication. I continue to learn engineering mathematics to improve my ability to conduct static and dynamic computer simulations. In order enhance the mechanical performance of the robots I create. I often use off-the-shelf circuit boards in conjunction with microcontrollers and single-board computers to drive motors, cameras, and other electronics wirelessly. These circuits also require programming which I often write using high-level languages that can be manipulated easily by an end-user. There are many facets of engineering required to build robotics and I hope to become a “jack of all trades,” in the subject, growing skills in each aspect of the creative process.



What inspired you or what is the idea that got you started?
It is often necessary in combat for a fighting force to send a group of foot soldiers on surveillance missions in order to seek out enemy locations and to report back on these findings. As you might imagine, these searches are incredibly dangerous. This is especially true in wide-open desert environments where soldiers can be found by the enemy, become booby trapped or lost. There is currently a tremendous amount of government funding in place to design robots to replace humans on these missions. I wanted to see if I could solve this problem with a device that did not cost millions of dollars in government funding and that could be produced with a 3D printer relatively simply.
What is your project about and how does it work?
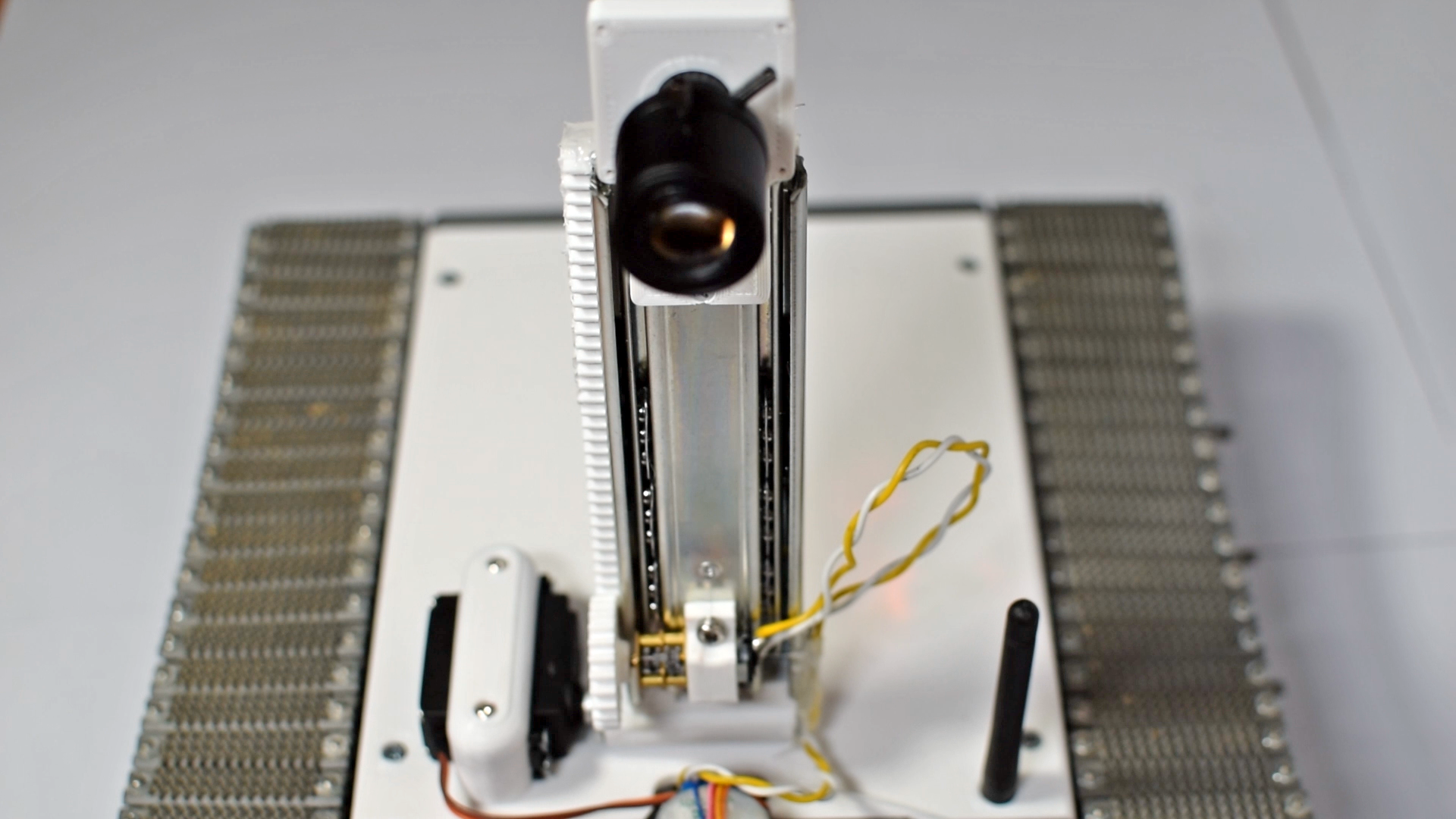
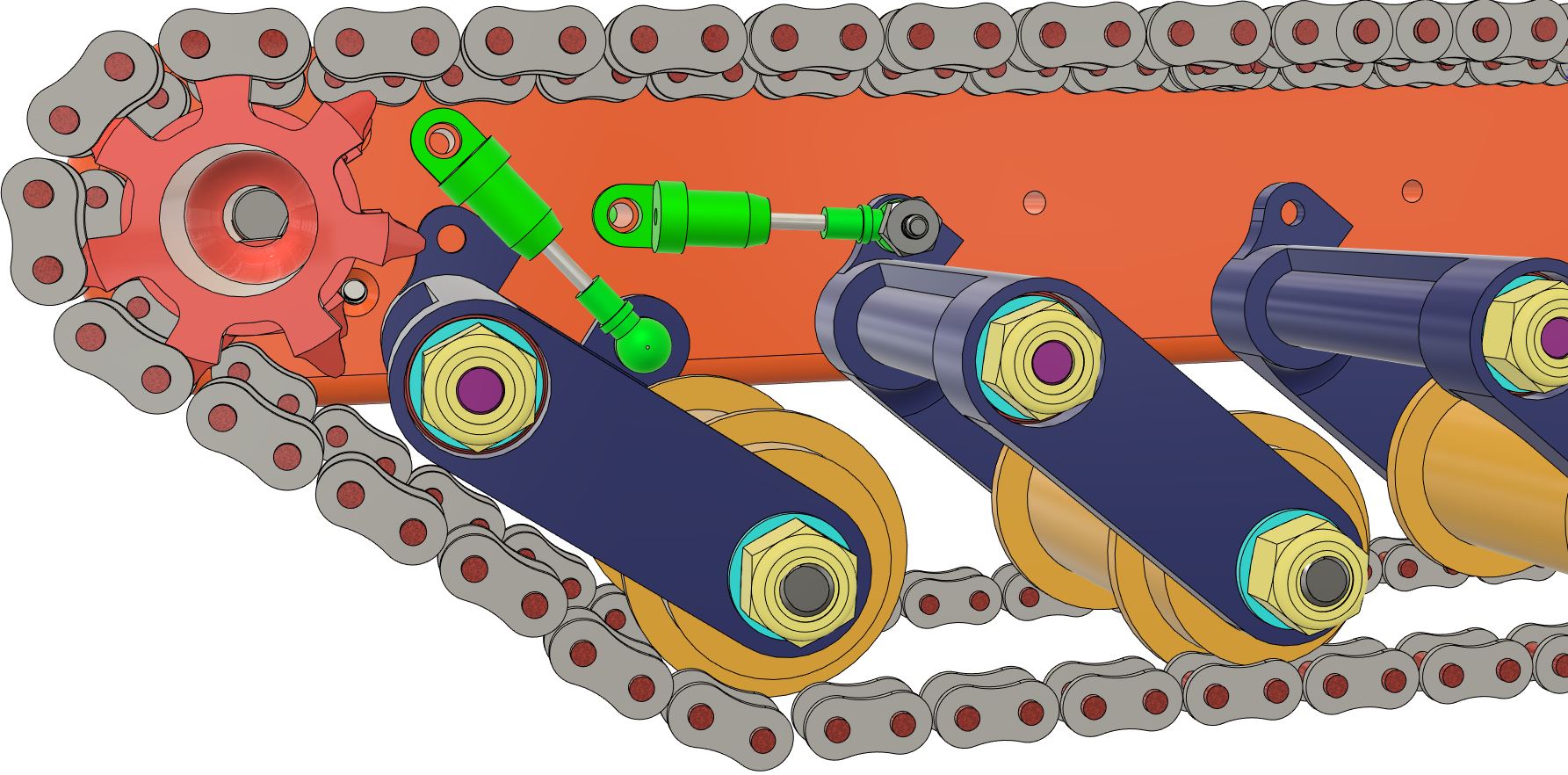
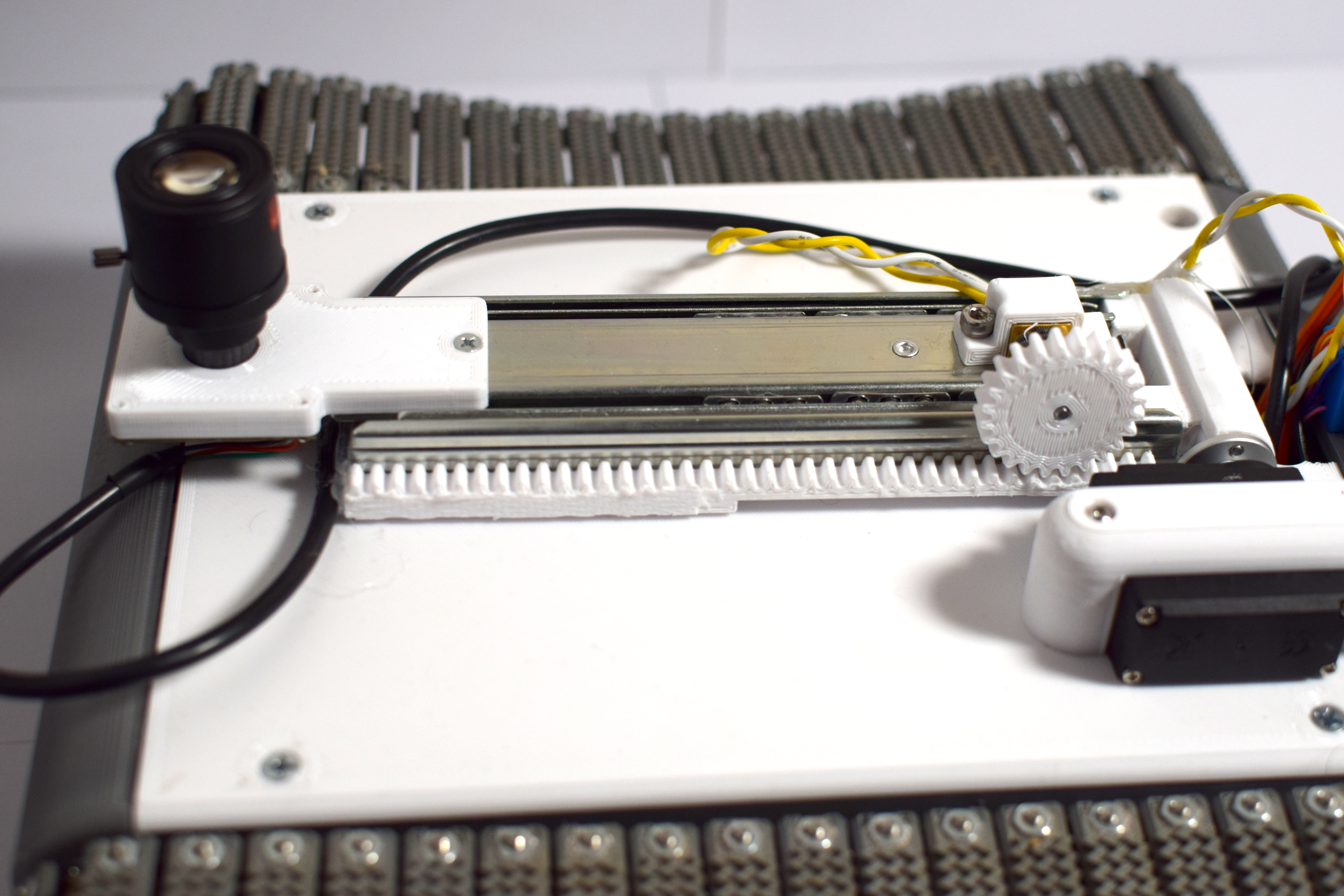
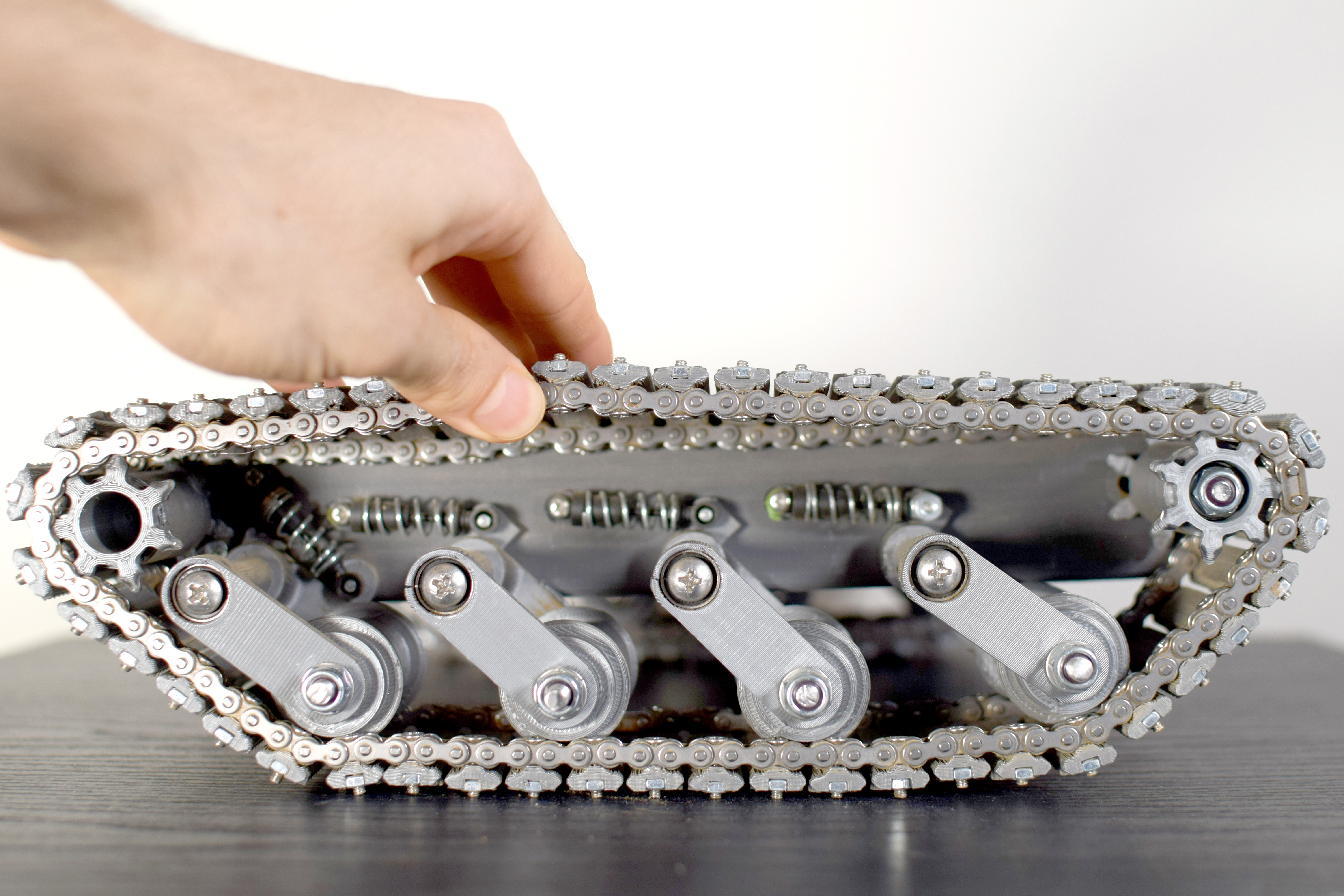
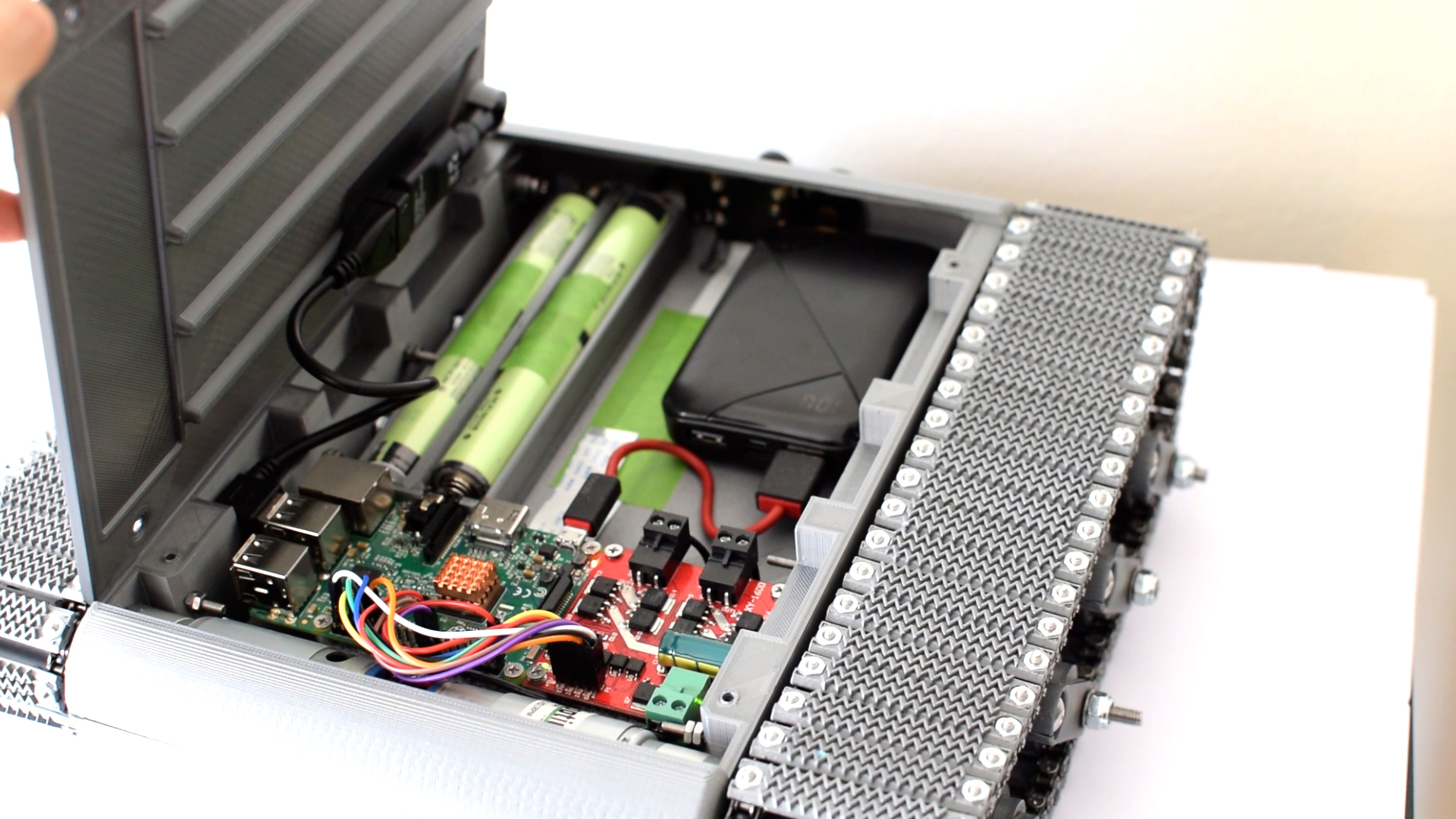
The method of locomotion is a continuous track, created using steel roller chain loops connected with fasteners to 3D printed links. These loops sit on a custom designed drive and idler sprocket supported by four shock absorber loaded roller pins that work as the suspension. The drive sprockets are driven by dedicated planetary geared motors ultimately controllable in speed and direction by a mobile device via a long range external antenna connected to a raspberry pi. For vision, there is a front mounted camera with adjustable focus and zoom controlled by two stepper motors, and a second night-vision camera on an articulating and extending arm for surveillance operations. These operations can also be conducted remotely via high-security WiFi access point from the raspberry pi.
What did you learn by doing this project?
I learned how to create a moving, locomotion assembly in Fusion 360. The greatest challenge was when the first suspension system failed and had to be redesigned from scratch. It was a setback, but also a great learning experience. In addition, I learned about the control of motors and cameras via custom written WiFi and control code. I had not done much coding or connection of electronics before and had the privilege of creating a complex circuit using many off-the-shelf boards and the Raspberry Pi. This was all new to me, but I learned as I went. I powered the system using a custom designed battery pack and continue to iterate on this system. Next, I want to create a printed circuit board that can replace all of these chips. This will also be a new challenge and experience. Lastly, I learned video editing both when programming the on-board camera and the video of the robot itself.
What impact does your project have on others as well as yourself?
I have created a final video and two sequels which explain the evolution and development of the robot. After the first video was released, viewers made it apparent that there were severe drawbacks in the design. Concerning the second camera, it was added in the sequel “Robot Vision System,” to address the issue of such a low profile front camera. This second camera can extend over a foot in height from the top surface of the robot providing a wide viewing range, whereas the initial camera was only about 4 inches from the ground. Many of the subscribers that offered suggestions went on to either investigate the video sequel, attempt to build their own Desert Eye, or were inspired to form a new project based off of what they saw. I hope Makers everywhere are inspired by my work and want to build something of their own seeing how simple it can be. I want to ultimately make this assembly into a learning tool that people can purchase as a kit and reprogram to their hearts desire.


