

Educational Robot Arm
By Isaac Venezia
A low-cost robot arm designed to give more students access to robotics.
Type: Education

About them: My name is Isaac Venezia, and I'm from Lunenburg, MA. I'm 18 years old, and I have a strong passion for learning engineering through hands-on projects. I'm currently a student at Middlesex Community College, and I'm about to complete my associate's degree in Mechanical Engineering. Last year, I started learning Arduino and 3D printing in my free time. Each project I built would teach me something new that I could apply to the next one, making it better than the last. I had an incredible professor last semester that was always supportive of my projects and encouraged me to improve my CAD skills by taking the Professional SolidWorks certification exam. Preparing for this exam made me dedicate even more time to designing projects in CAD as extra practice.I think hands-on projects are a great way to mentally solidify concepts taught in engineering classes by seeing how they apply in real life. For me, projects are the most efficient way to learn. They're also a lot of fun!
Social:



What inspired you or what is the idea that got you started?
My original inspiration for this robot came from realizing how expensive commercial educational robots are. Even the existing DIY robot designs I could find used expensive components like custom machined parts, steel gear reductions, or large ball bearings. I saw this as an opportunity to create an open-source robot with the lowest possible cost without compromising potential as a learning tool.
There's also something about the unmistakable biomimicry of robotic arms that makes students immediately connect with them and want to learn. They certainly had that effect on me.
One particular project that inspired me to pursue robotic arms is the large six-axis industrial robot named Jarvis built by Jeremy Fielding. He created a fantastic video series about the design process of the robot, explaining the underlying physics and engineering principles.
What is your project about and how does it work?
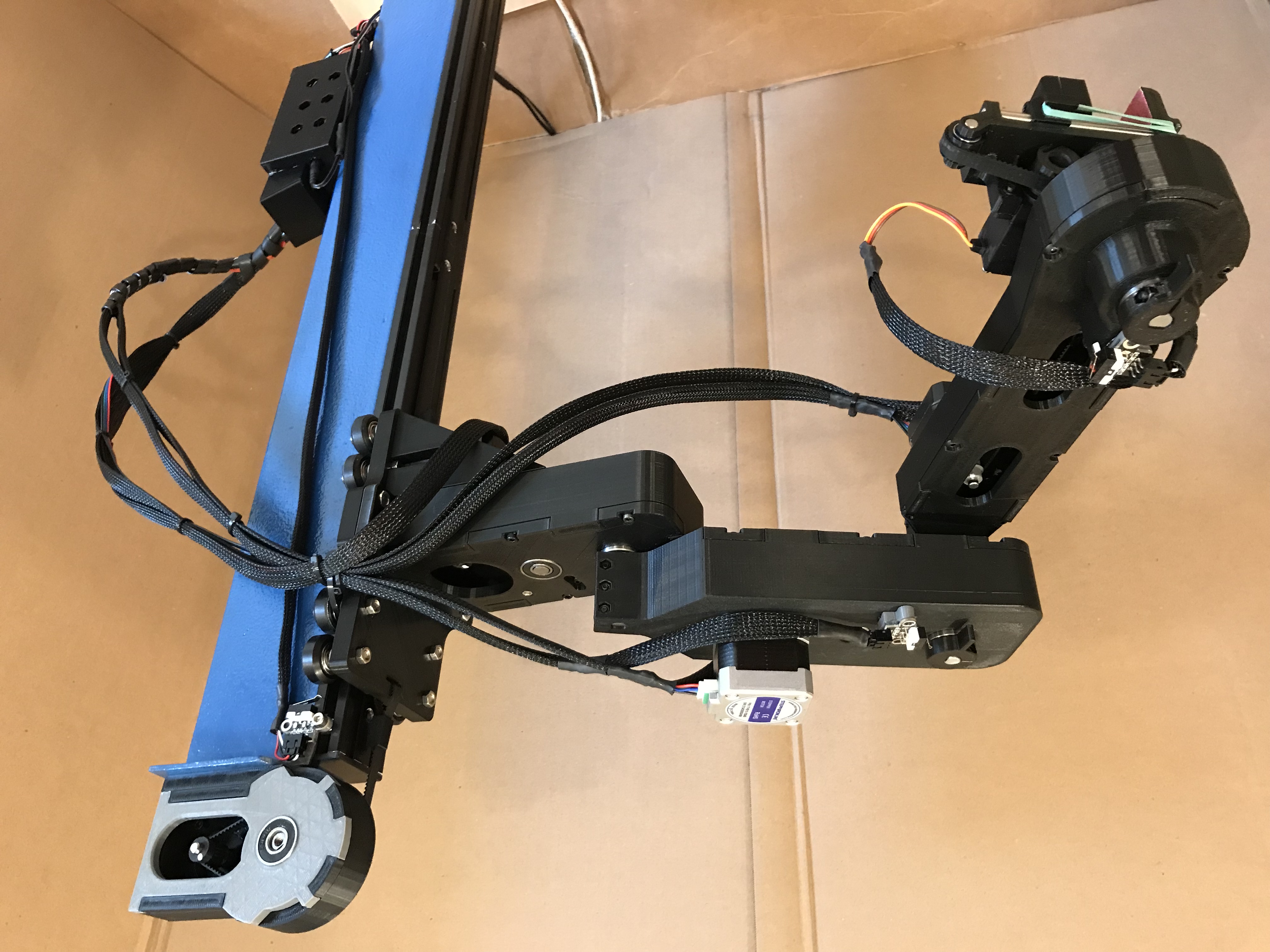
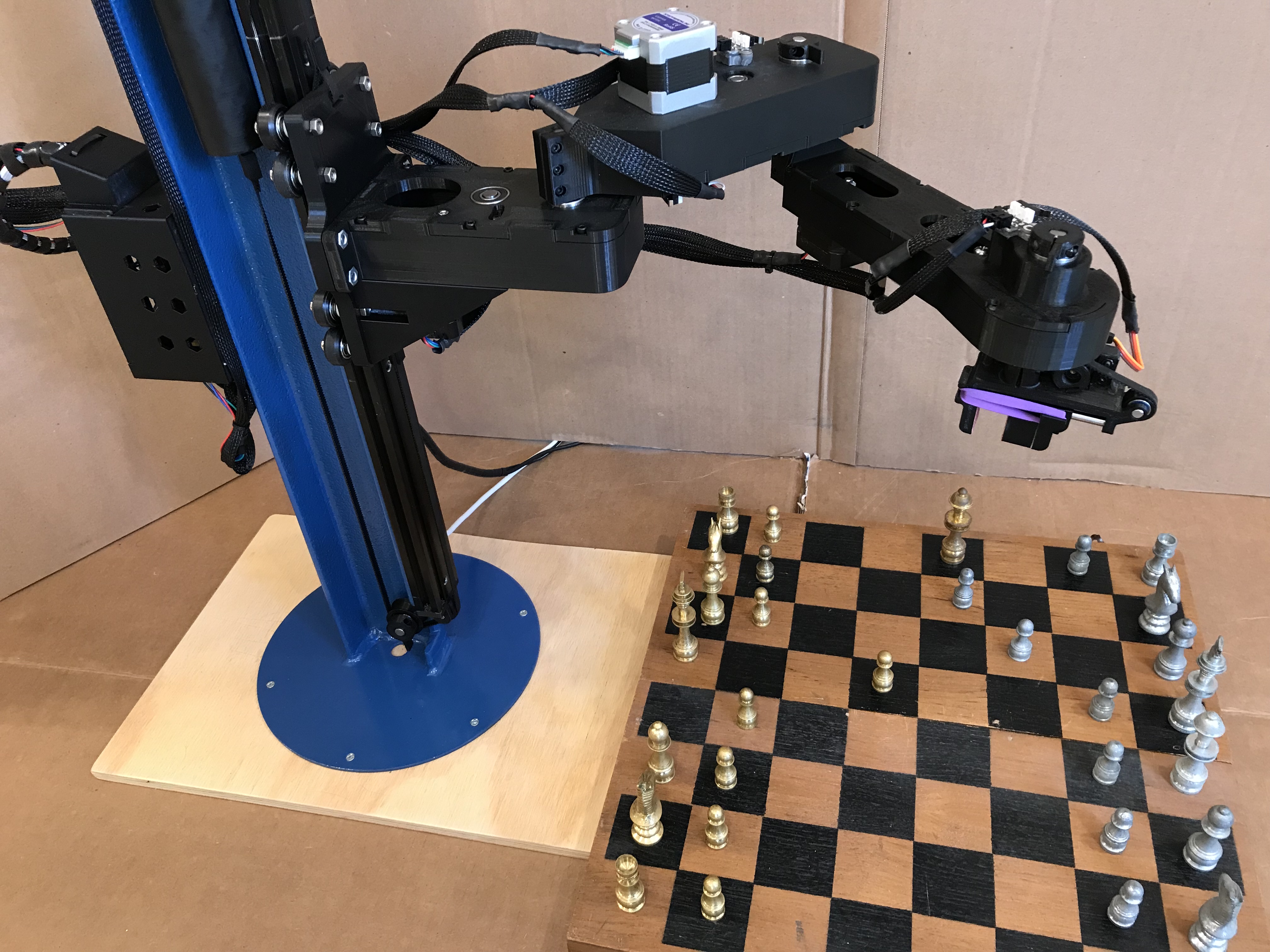
My project is a low-cost SCARA robot made mostly from 3D printed parts. This robot can be built for under $200, and I designed all the 3D printed parts to be printable on an Ender-3 or a similar low-cost FDM 3D printer. (Note: a SCARA robot is a style of robot arm that stands for Selectively Compliant Articulated Robot Arm)
The robot's main arm segments contain 3D printed timing belt actuators I developed. These provide an increase in torque for the motors in exchange for some speed.
I welded the stand together using steel to make it as rigid as possible, however the stand could alternatively be made from a wooden post such as a 4x4. Inside the stand is a counterweight that balances the weight of the arm and allows a smaller (and less expensive) motor to control the height of the arm.
I used an Arduino Uno as the brain of the robot which commands the stepper motors to move. I had some help with the serial communication aspect of the code from Alexander Venezia.
What did you learn by doing this project?
The most important lesson I learned from this project is the value of persistence. Most parts did not work how I expected the first time and took several iterations to get working. It has taken me hundreds of hours to reach this point in the project, between the designing, building, redesigning, rebuilding, debugging, testing, and documenting phases. However, I'm very glad I didn't give up and continued developing this project until I had a design I could feel proud of.
This is the fourth robot arm I have designed over the past year, and is by far the most sophisticated. These projects have taught me an incredible amount about mechanical design, electrical prototyping, coding, CAD, and 3D printing. Everything I learned from one robot I applied to the next to improve it.
On a more technical level, I learned a lot about designing actuators to have minimal backlash, designing parts to maximize rigidity, and working with inverse kinematics to control the robot.
What impact does your project have on others as well as yourself?
My goal in designing this robot is to allow more students to have access to robotics. A robot arm like this offers nearly endless potential for learning and developing robotic control software, among other uses. While there are many existing commercial options for educational robots, most are far outside the financial reach of individual students or smaller community colleges. Students can also learn directly from the process of building this robot, which in many ways makes a DIY robot better than a pre-built option.
Since posting the design files on GitHub a few weeks ago, I've received messages from nearly a dozen college students and makers who are planning to build this robot for their classes or as a personal project. It makes me incredibly happy to see so many people interested in robotics!
On myself, the largest impact is the knowledge and skills this project taught me. I know I will use these to create even better projects in the future.


