

Four Muses
By Alana Balagot
Four experimental robotic instruments are controlled wirelessly with a MIDI keyboard and LED matrix display in four different modes.
Type: Artistic






What inspired you or what is the idea that got you started?
We've always wanted to make robotic musical instruments, and learn more about MIDI.
What is your project about and how does it work?
We are inspired by music and technology and their intersection. We made four robotic instruments, four spirits that respond to the instructions you send them in their way, and four modes for interacting with them separately or together.
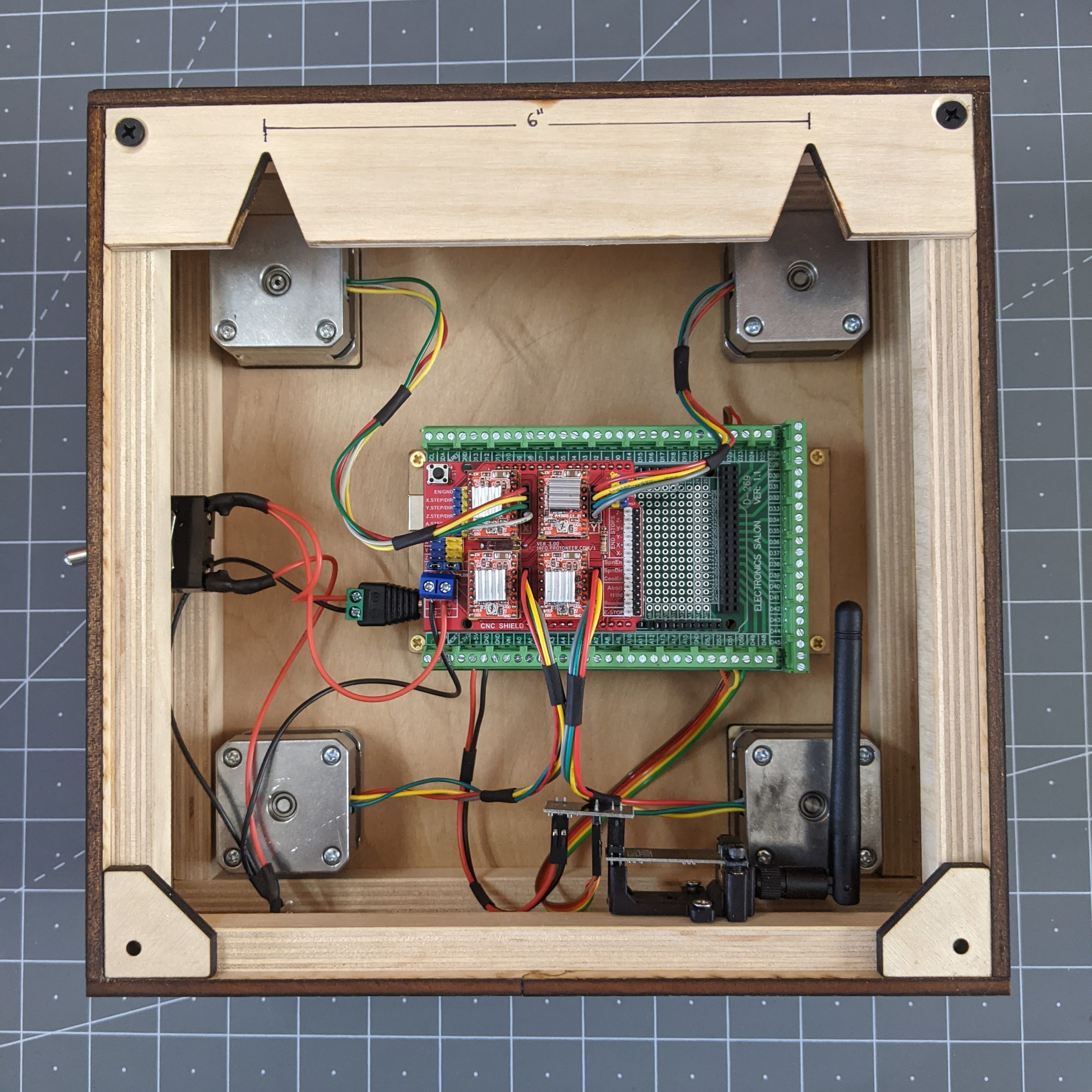
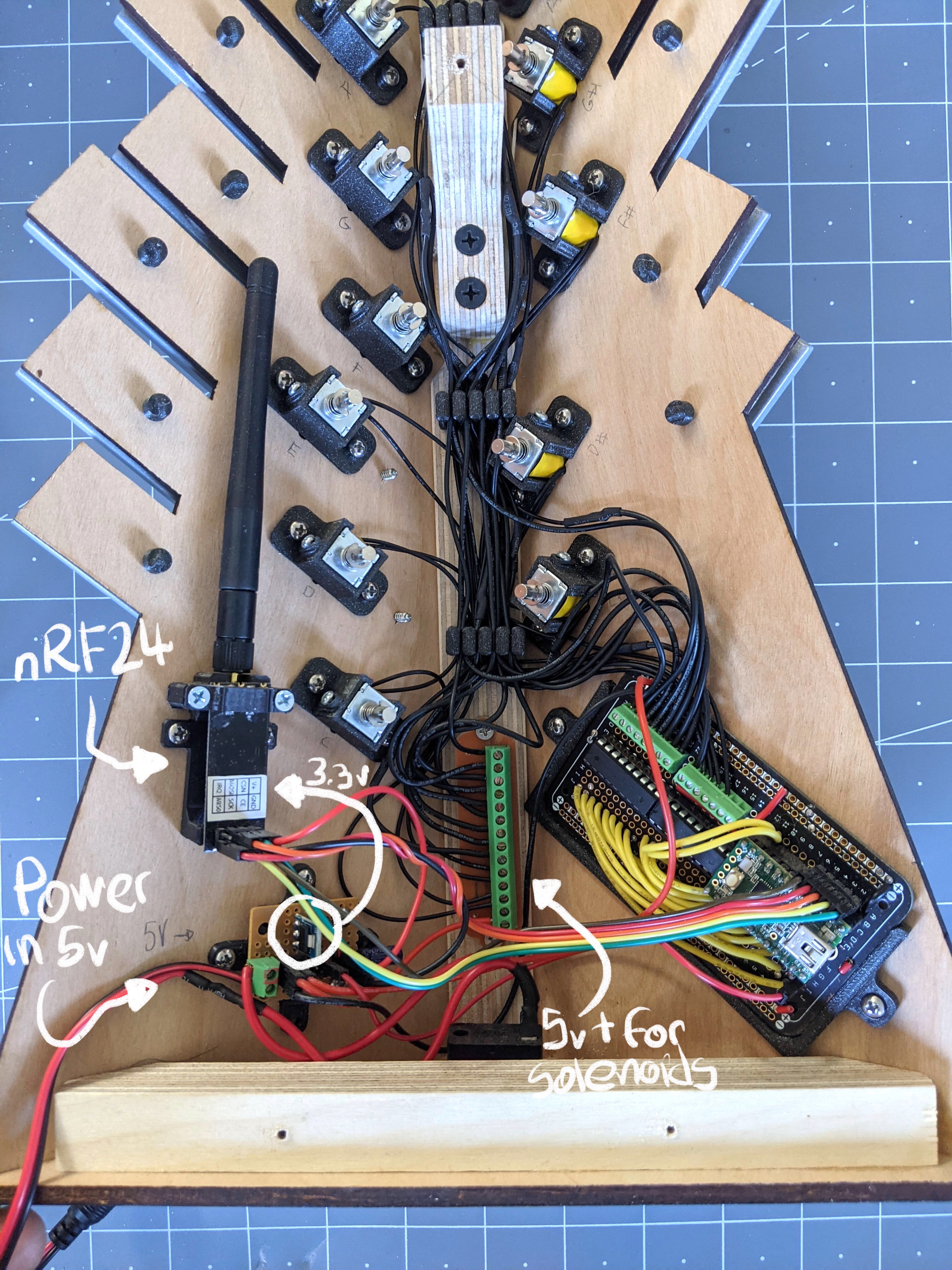
The project uses an Arduino Mega and an NRF24 to control the instruments wirelessly, and the instruments have a variety of teensys, Arduino, and Arduino Megas. We used stepper motors, servos, solenoids, and DC motors to articulate the robot movements.
We have more documentation of the build process on our notion:
https://wolfcatworkshop.notion.site/4-Muses-Music-Sculpture-122940b994e64b9ab3777184cd010287
And Hockaday had a nice write-up as well: https://hackaday.com/2021/11/24/mechanical-musical-sculpture-recalls-the-four-muses/
What did you learn by doing this project?
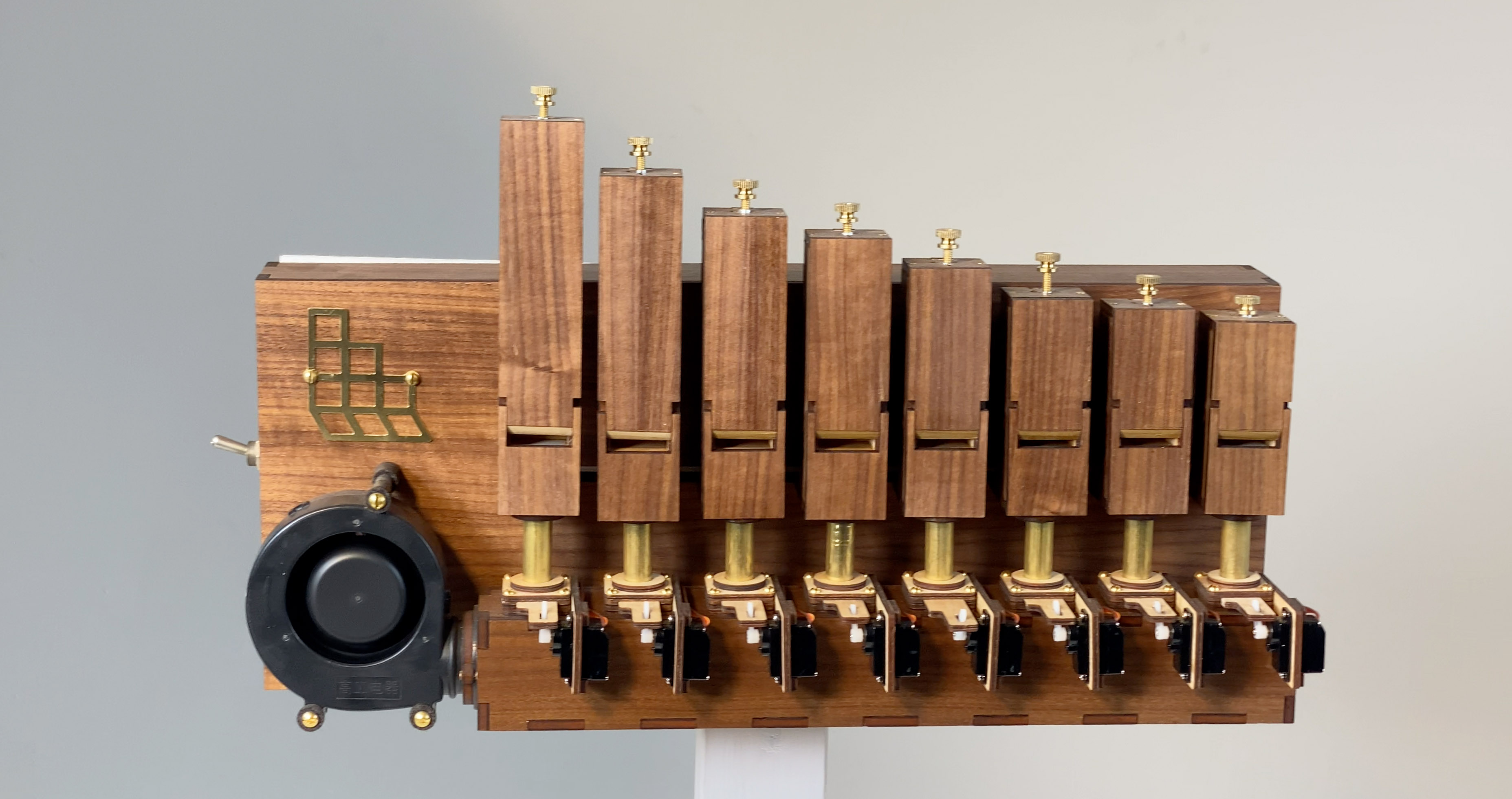
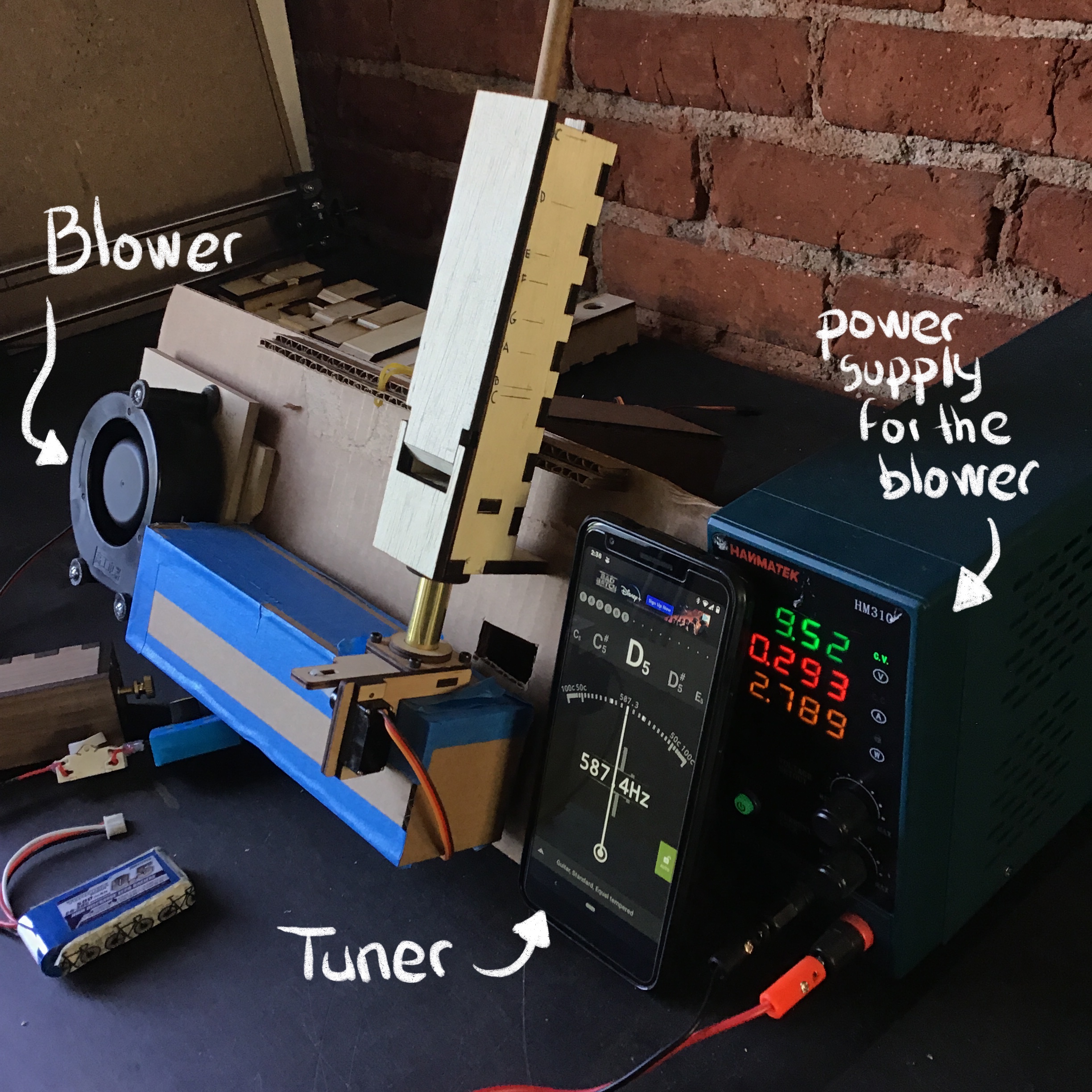
We learned that musical instruments are more complicated than we thought, especially pipes. We learned a lot about reeds, pipes, pipe shapes, bellows, radio protocol, motor noise, and MIDI protocol.
What impact does your project have on others as well as yourself?
Instruments have personalities. They have different temperaments, colors, shapes, and sizes. They have different timbres, volumes, moods, and mechanics. Quirks and preferences. They will tell you when they’re played correctly and not played correctly. We spent much of our lockdown learning about them. What angle of the mouthpiece and air speed makes a pipe sing the most clearly? How do you tune them? Which material and what strike time is ideal for striking a xylophone? As we crafted each instrument, their personalities came out, each with its own tastes and challenges. Could we make them play themselves, wirelessly, to give them a demanding presence in the room? In what ways could we make them sing together? In what ways could we make them sing together, their sum greater than their parts, either pleasantly or cacophonously?
Four Muses is on display at sp[a]ce gallery in Pasadena, and is available for people to walk up to and interact with it.


