

iGoBot - a GO game playing robot
By Daniel Springwald
iGoBot is a robot that independently plays the Asian board game GO. To do this, it recognizes the human opponent's moves via camera and sets its own moves with a robot arm..
Type: Artistic

About them: Hello from Bochum, Germany!I'm Daniel Springwald, and my hobby interests are electronics, video games, and virtual reality development, chatbots, Japan, Star Trek, artificial intelligence, robotics, paper crafting, and everything related to artificial life forms.For more details check out my blog: https://daniel.springwald.de/
Social:


What inspired you or what is the idea that got you started?
I have been playing the Asian board game GO since my youth. Since I am also very interested in robots, I already had the idea to build a robot for it in the 1990s. However, at that time I didn't have the resources to do so. Through the Raspberry PI and the inexpensive electronics, this has now become possible.
What is your project about and how does it work?
The robot should play GO authentically and behave as much as possible like a human gamer.
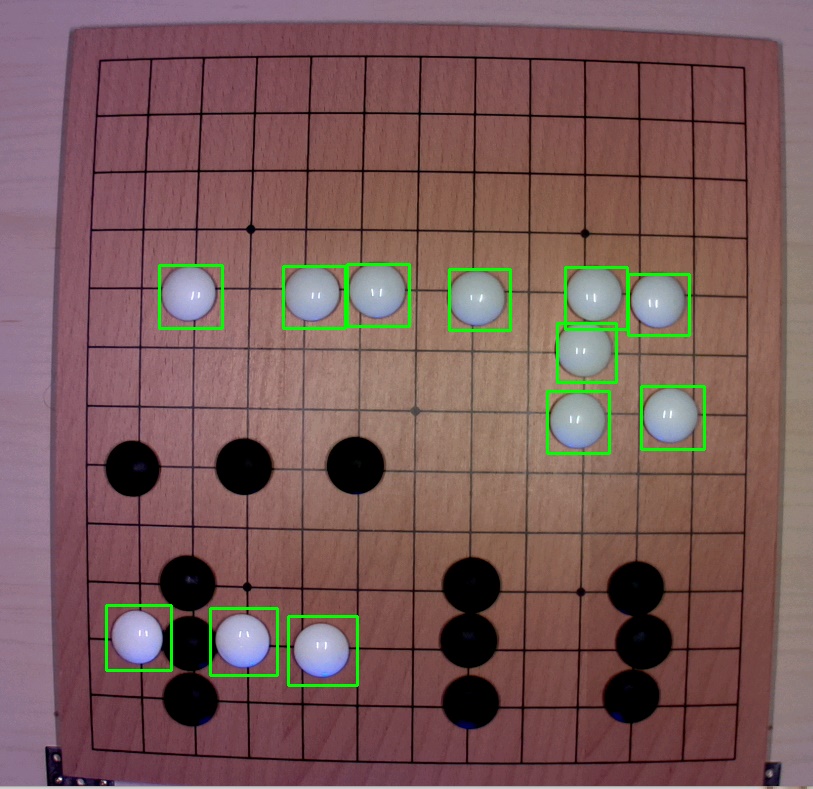
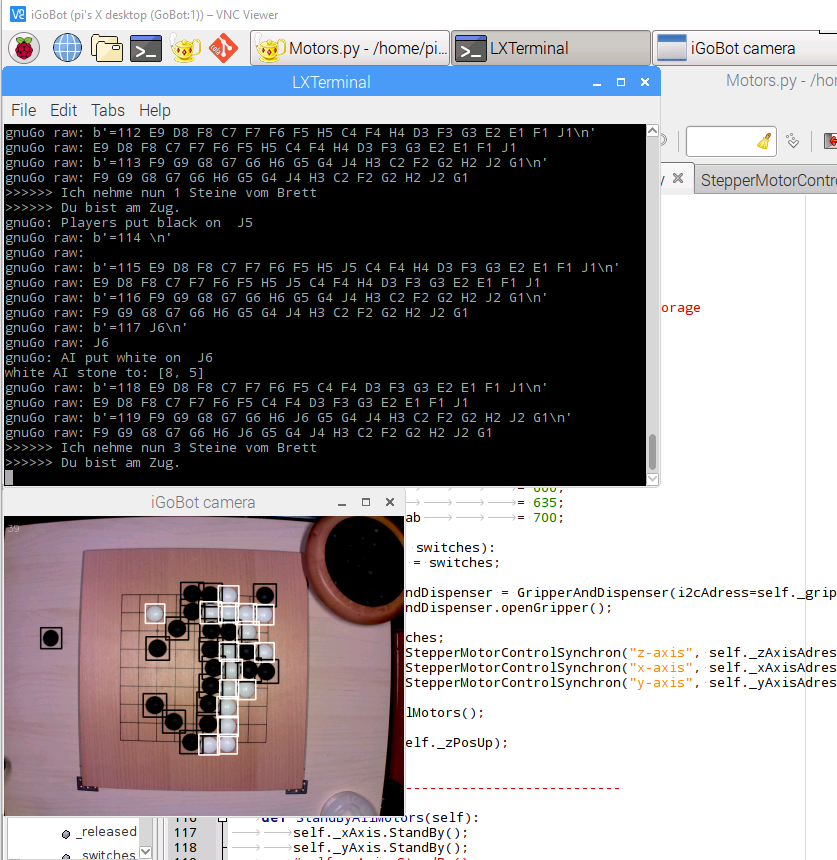
To do this, the robot can use a camera and OpenCV to recognize where the player has placed a stone on the playing field.
It then uses GnuGo artificial intelligence to calculate the next sensible move.
Using a pneumatic gripper, it can then pick up a tile and place it on the board.
He can also use the gripper to remove captured pieces from the board.
What did you learn by doing this project?
The most exciting part of this project for me was the construction of the gripper.
I made the first attempts with mechanical grippers, but since GO stones are very smooth, that didn't work out well.
I had no experience with pneumatics before and the first version of the pneumatic gripper was very noisy and still needed a big compressor. The construction of the separator for new tiles was also tricky because the tiles always have to be in the same position and they don't get lost. For this, I had to learn OpenSCAD intensively.
What impact does your project have on others as well as yourself?
When I exhibited iGoBot at a Maker Faire, most visitors did not know the rules of GO.
But since these rules can be learned very quickly, the visitors were able to play a small game against the robot themselves after a few minutes.
I'm always happy when more people get to know the game and maybe want to come to a local GO game event in your city.


