

omicro | Hand-operated spherical robot
By Takuya Ichise
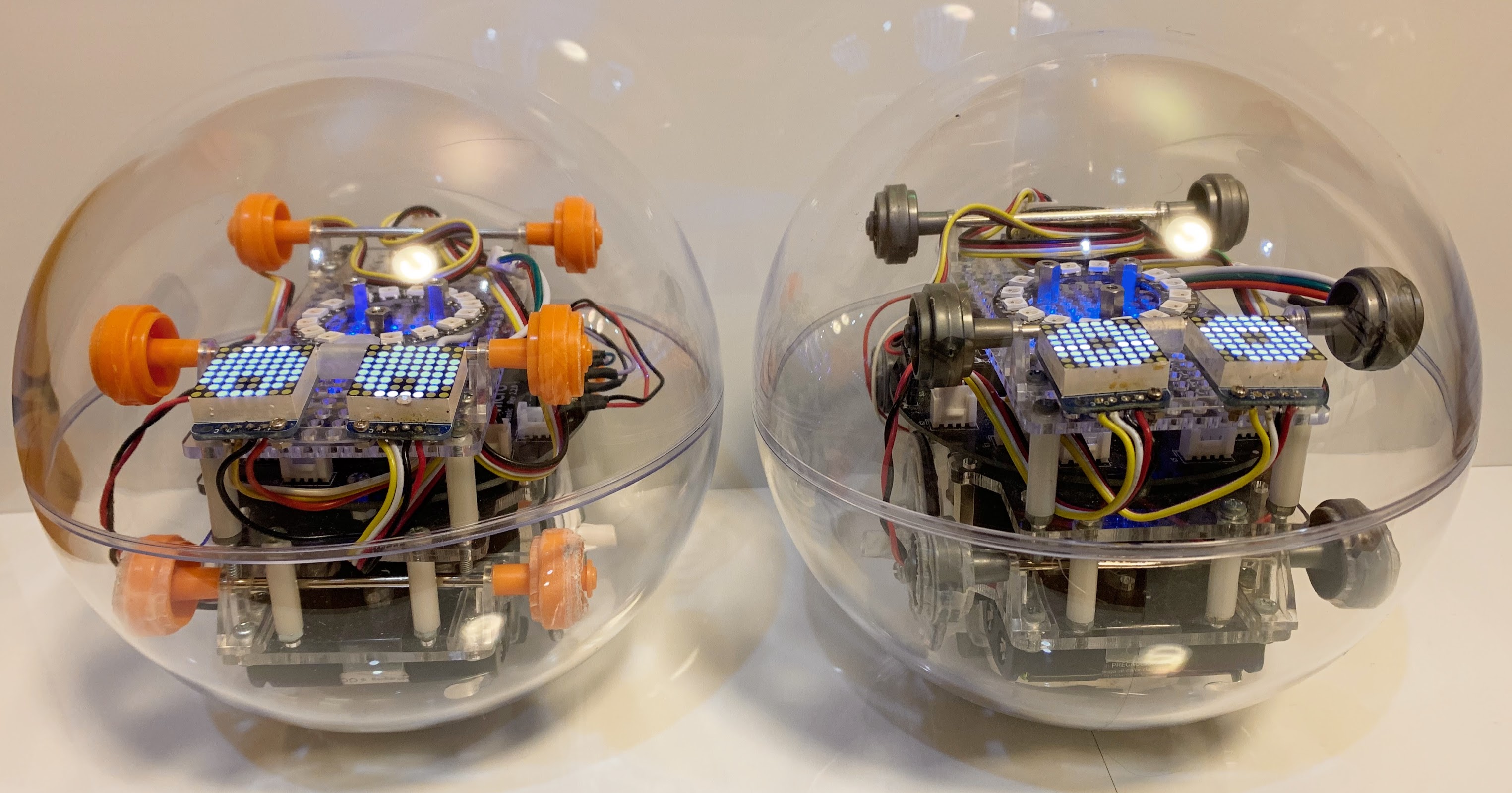
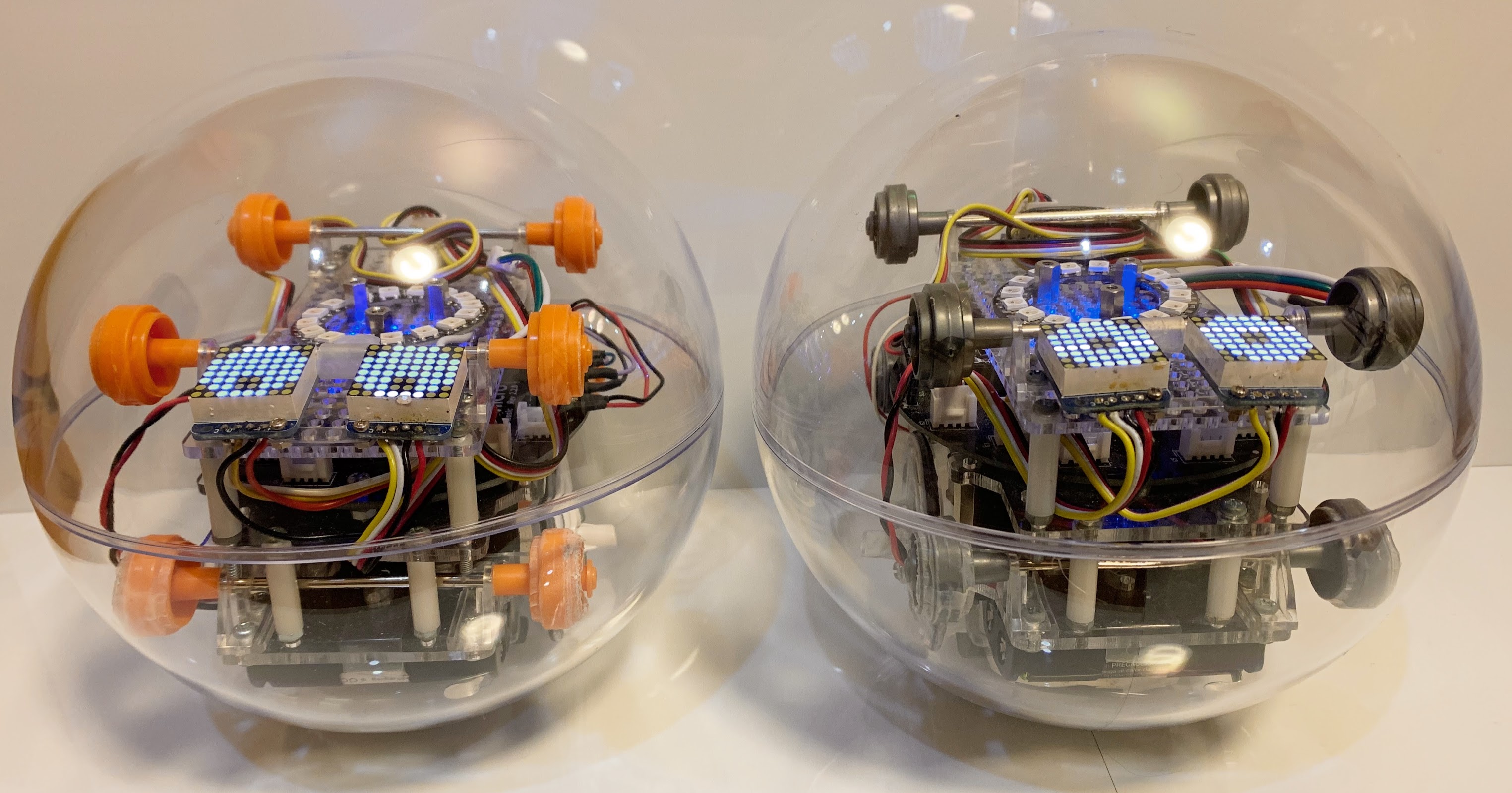
OMICRO is a robotic ball. It can be controlled from a smartphone or tablet, and when combined with the Apple Watch, multiple balls can be controlled simultaneously using only hand movements.
Type: Commercial, Artistic, Education
Website: http://omicro.tokyo/

About them: Japanese Maker. Making smartphone apps, robots, and Unity-based works. I have recently exhibited at Maker Faire in Bay Area, Singapore, Tokyo, Ogaki, Taipei, Bangkok, Shenzhen, Prague, Kyoto, and Manila.I love Maker Faire and exhibit at Maker Faire in about 4 countries every year.
Social:







What inspired you or what is the idea that got you started?
When I first saw the robot ball in the movie running in the sand, I thought there was no way it could run like that in real life. I started to test that, and that is when I first started playing robot ball.
The first time I moved multiple robot balls at the same time was when I saw a drone flying in a swarm. As you may know, it is difficult to fly drones in Japan, so we tried this with a land-based robot.
The exhibit was the first time I created a function that could be moved by hand. I created this function because I thought that children would think it was magic if it moved in conjunction with their bodies rather than inorganically moving with a smartphone.
What is your project about and how does it work?
omicro is a robot ball. It can be controlled via bluetooth from a smartphone or tablet. It can be controlled by hand gestures and can also be used with Apple Watch to control multiple balls at the same time using only hand movements. In addition, virtual obstacles can be placed in the AR space via the Unity app to control the real robot ball so that it does not hit the virtual obstacles.
- You can run from iOS smartphone app.
- This robot detects changes in the posture of the ball with a 6 axis combo sensor. When the attitude is greatly collapsed during braking, the sensor senses and the wheels automatically move to return the ball to a stable attitude.
- Can be controlled by giving instructions with hand gestures. Machine learning of hand movements to control the ball according to gestures.
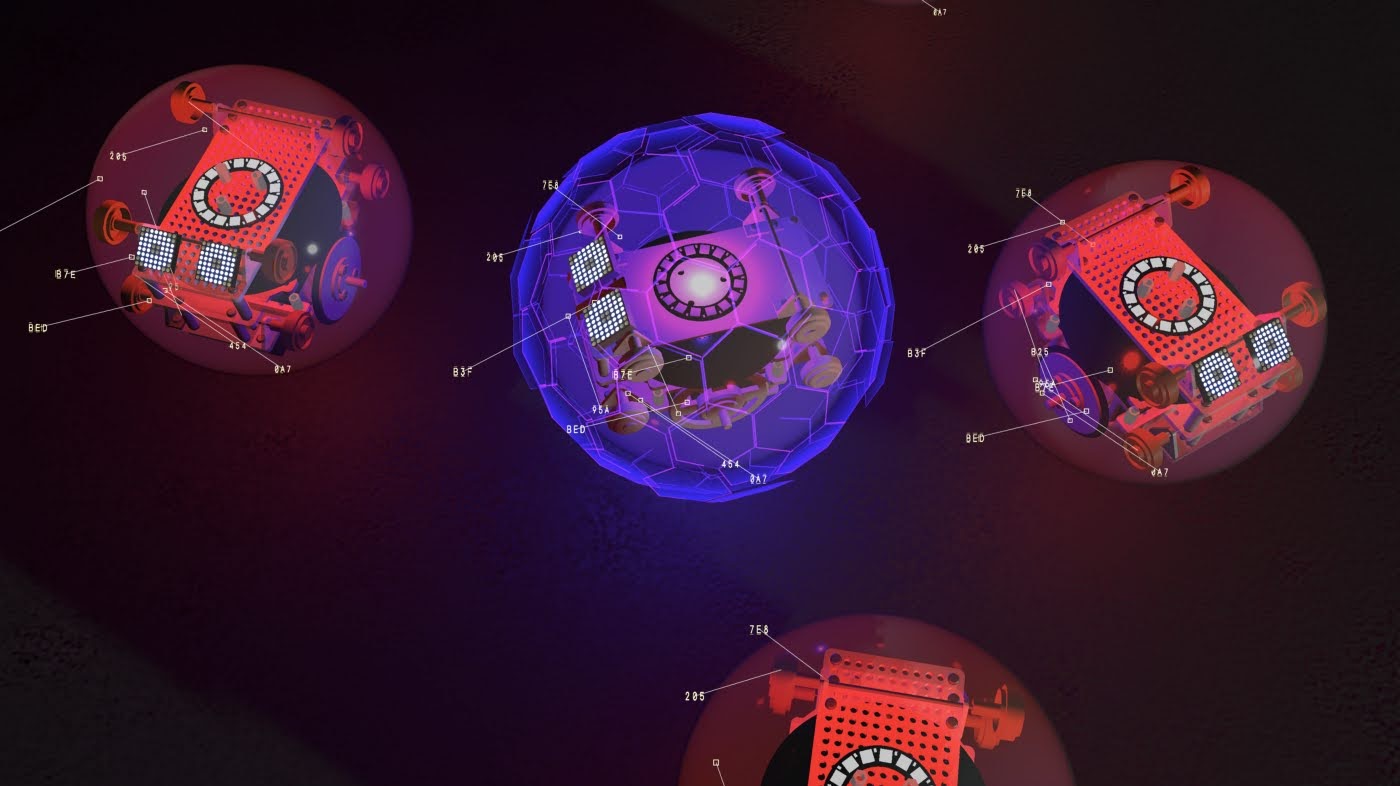
- AR effect addition and virtual obstacle placement function by Unity app. Digital twin detects collisions in advance and reflects feedback to the real ball.
What did you learn by doing this project?
I have learned that spherical robots are structurally suited for STEM education.
Until now, most STEM education robotics courses have used humanoid, car, and crawler robots, but I have found that spherical robots are a great way to build inexpensive robots that can rotate 360 degrees. We also learned that parents want safety in the robots they buy for their children, and the spherical, protected robot ball meets that need.
Also, the omicro’s simple structure with cute eyes made it easy to attract children from all over the world.
What impact does your project have on others as well as yourself?
Through this project I have learned so many skills outside of my day job. Electronics, robotics, 3D printing, Unity, xR, machine learning. Through the exhibition, I have learned from the experts, and the technical exchange with them has had a great impact on my life.
I hope that this work will present a use case for spherical robots and expand the possibilities so that they can be used in STEM education and the arts in the same way that humanoid, car, and crawler robots are used. I hope that every child in the world will have a robot ball, and that new spherical robots will be used to create products that change the world.


