

PneuAct: Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting
By Yiyue Luo
PneuAct is a scalable pipeline to computationally design and digitally fabricate knit pneumatic actuators with integrated sensing; our system allows users to virtually design and preview actuators to be machine knitted quickly at low costs.
Type: Education
Website: http://pneuact.csail.mit.edu/

About them: Yiyue Luo is a 4th year PhD student in the Computational Design & Fabrication group (CDFG) at MIT Electrical Engineering and Computer Science (EECS), advised by Professor Wojciech Matusik and Professor Tomas Palacios. Her research interests are fabrication, smart textiles, and tactile sensing.
Yiyue Luo - Project Leader
Wojciech Matusik - Principal Investigator
Michael Foshey - Hardware Researcher
Kui Wu - Software And Computational Knitting Researcher
Andrew Spielberg - Robotics Researcher
Tomas Palacios - Principal Investigator
Daniela Rus - Principal Investigator




What inspired you or what is the idea that got you started?
Machine knitting is an exciting process. Compared with other digital fabrication methods such as 3D printing or even laser cutting, machine knitting is fast and inexpensive; further, it is capable of generating structures with complex 3D form and working with a wide range of yarns with different material properties. Using industrial knitting machines has long been quite complex and only accessible to experts. The Computational Design and Fabrication Group at MIT has been researching knitting-based design for several years, working on new ways both to make make the process more accessible to novices while pushing the boundaries of what can these knit structures can do. After a string of projects on knit-based sensing, part of the group became interested in how knitting's spatially variable form could also be used to program morphing, actuated structures, leading to PneuAct. More about the group's work and this project can be found at http://cdfg.mit.edu and http://pneuact.csail.mit.edu.
What is your project about and how does it work?
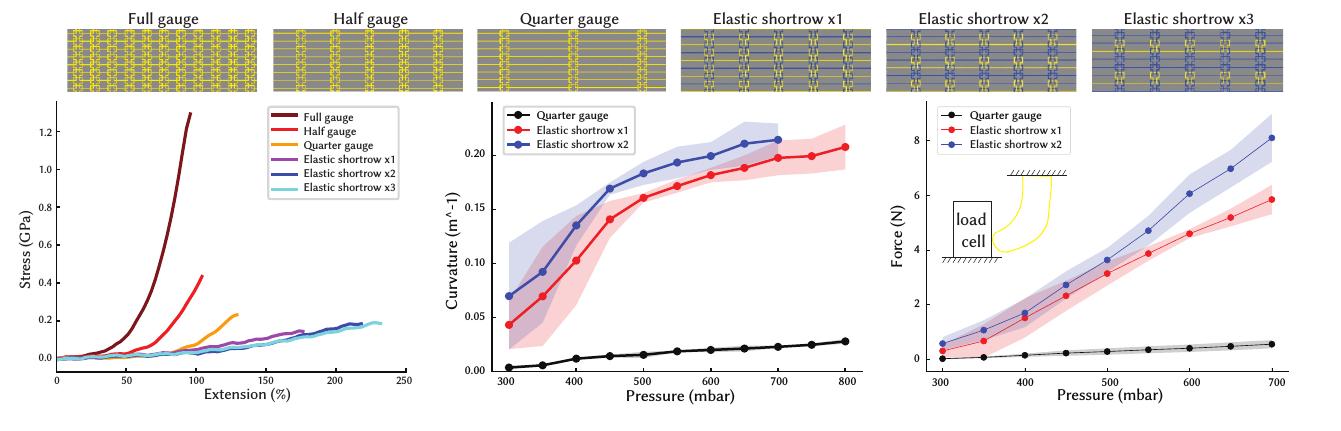
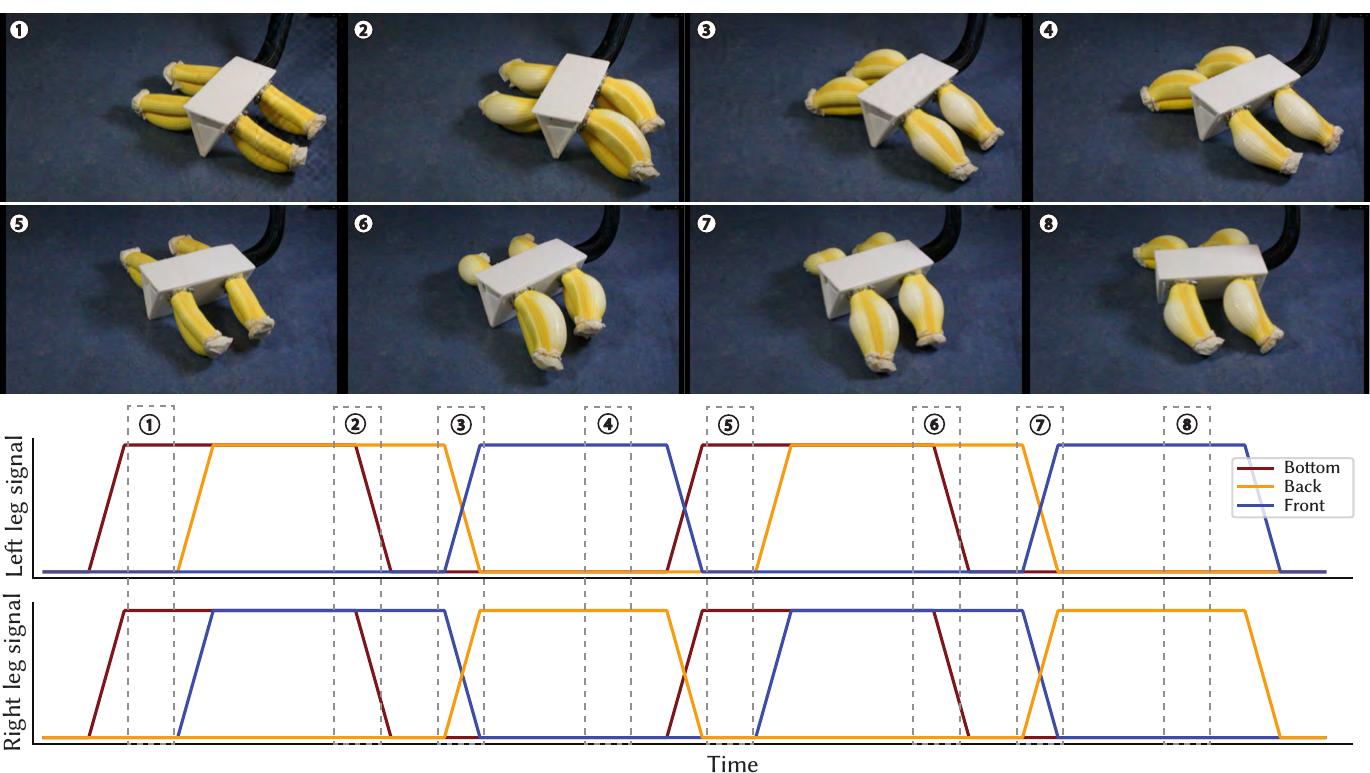
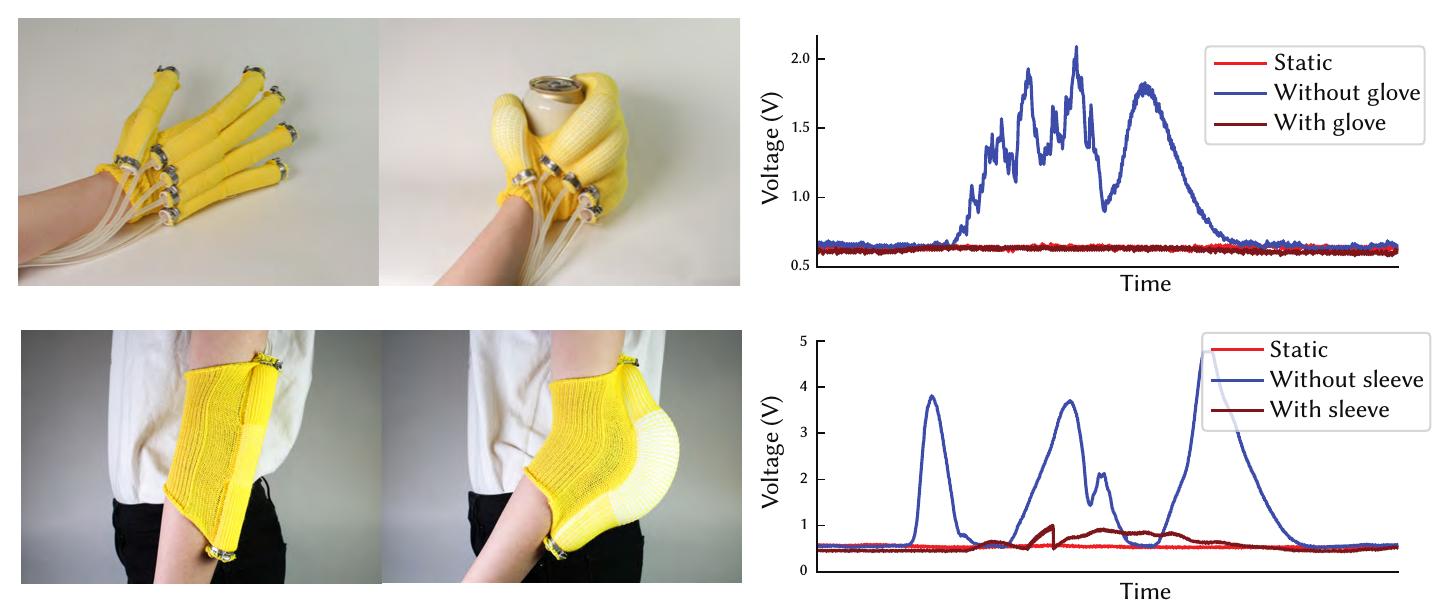
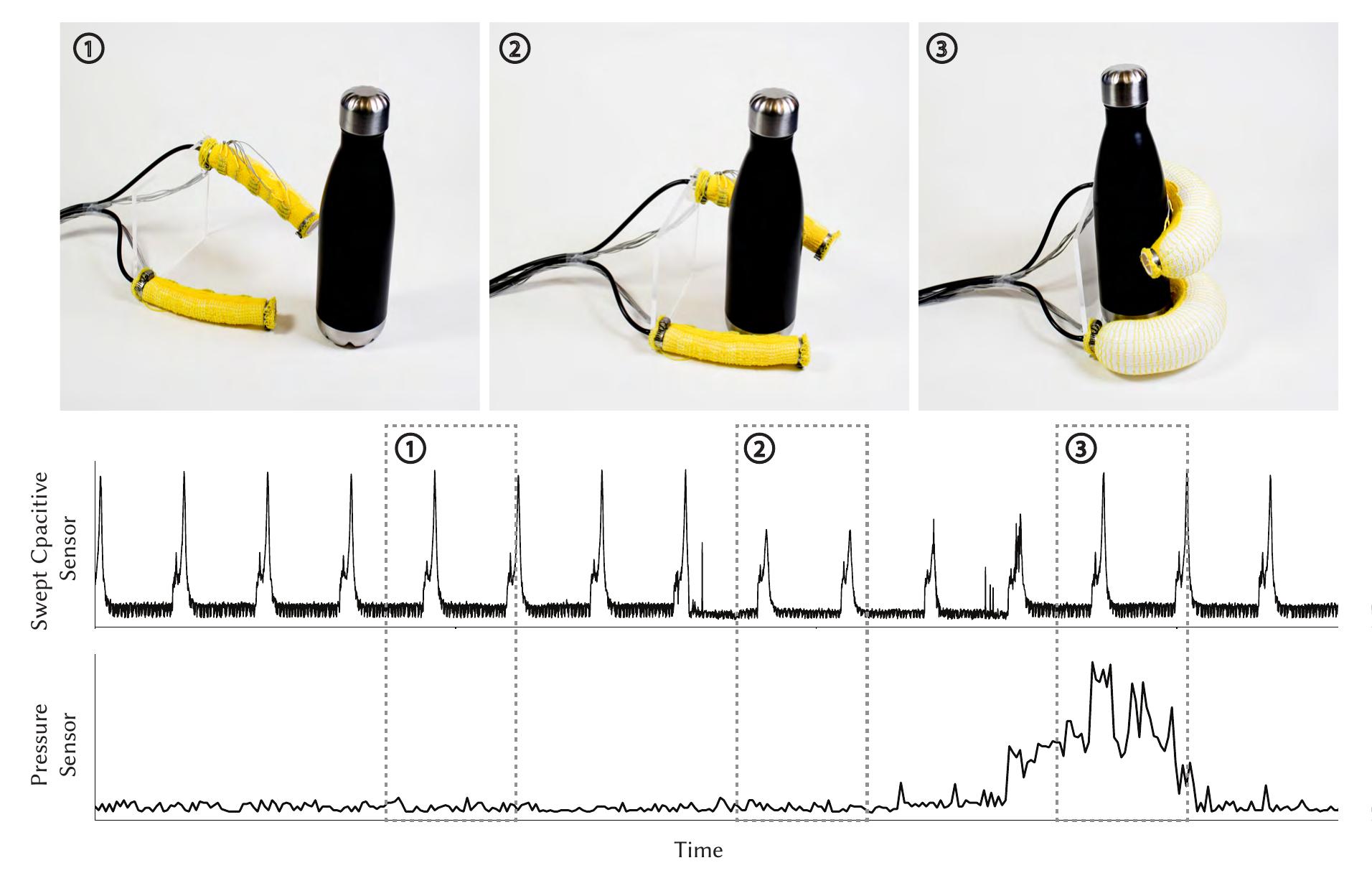
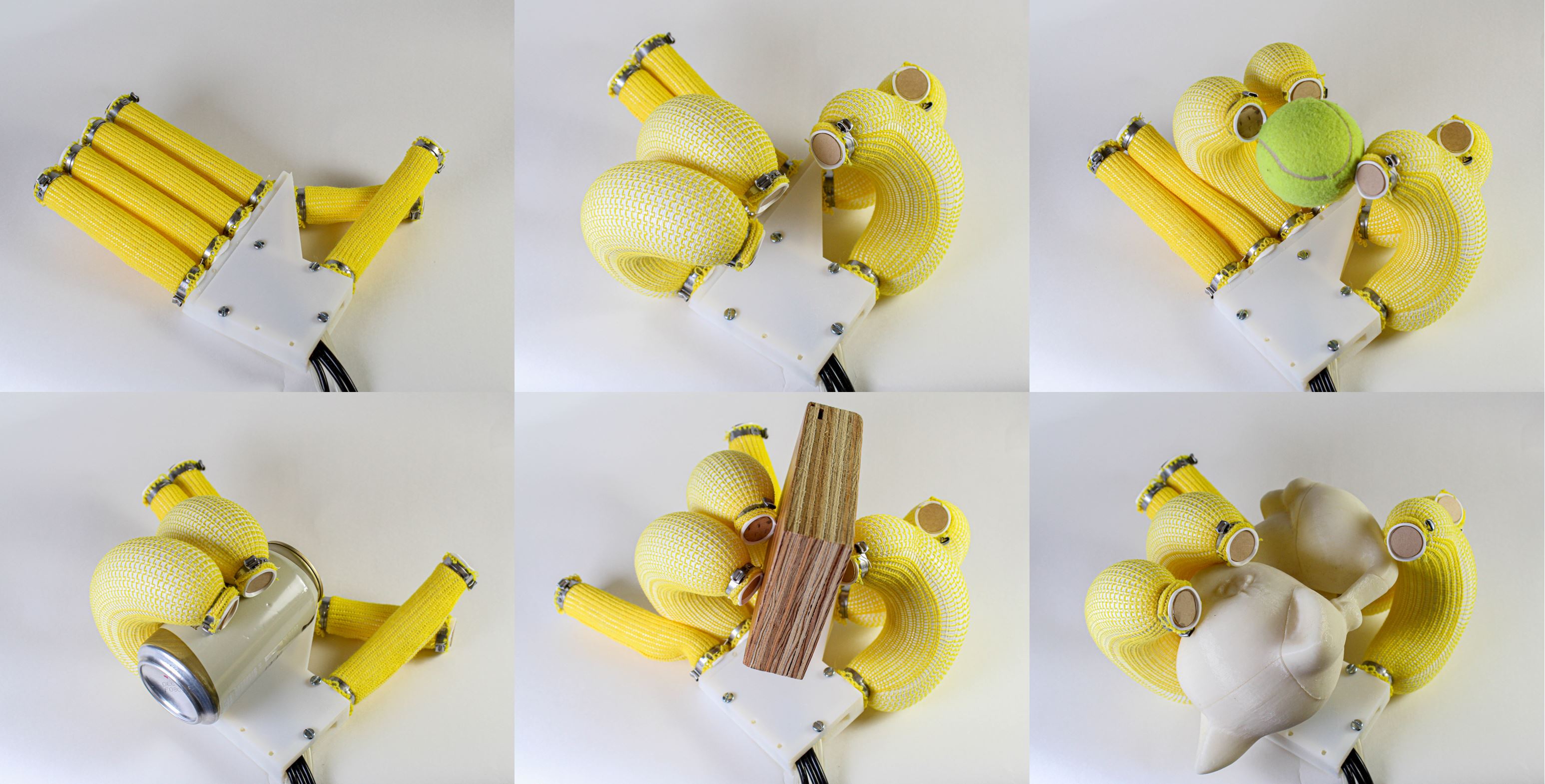
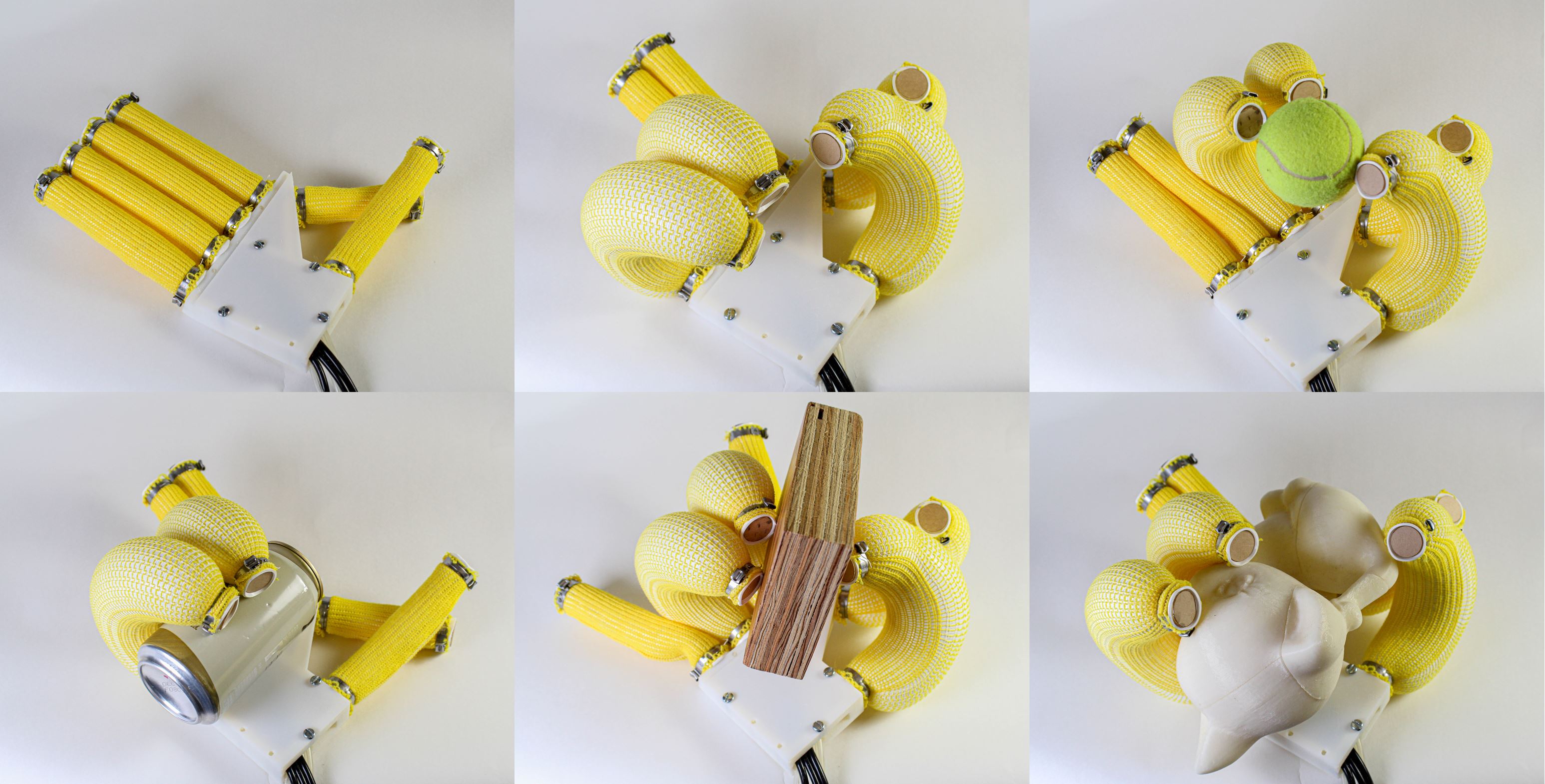
Soft actuators with integrated sensing have shown utility in a variety of applications such as assistive wearables, robotics, and interactive input devices. Our solution, PneuAct, presents a new workflow for computationally designing and digitally fabricating soft pneumatic actuators via a machine knitting process. Machine knitting is fast, digital (programmable), and provides access to a rich material library of functional yarns for specified mechanical behavior and integrated sensing. PneuAct uses elastic stitches to construct non-homogeneous knitting structures, which program the bending of actuators when inflated. Our method also integrates pressure and swept frequency capacitive sensing structures using conductive yarns. PneuAct further provides a simulation-driven design interface for quickly previewing actuator behavior. We believe PneuAct can provide a new, simpler way for designing soft actuators with integrated sensing, for next-generation assistive devices and robotics.
What did you learn by doing this project?
This project taught us the potential and the limitations of textile-based actuator design. We knew, based on previous work, that knit structures could be used to program bending in soft robotics actuators. But developing a simple design space, building a predictive model, and integrating sensing were all necessary components to make this fabrication method useful. PneuAct focused on filling in these gaps and building an easy-to-use, holistic design flow. In doing so, we realized that textile-based actuators can be made simple to design and fabricate. We also realized, however, that many pneumatic pressure supplies (used to power these structures) can be a bit slower and weaker than needed for highly dynamic motion. Further, we learned that it is still tricky to build fully proprioceptive sensors. Overcoming these current challenges, and integrating them in a more algorithmic design optimization system is the next frontier that we are excited to tackle!
What impact does your project have on others as well as yourself?
Soft actuators have long been tricky to produce. In soft robotics, for example, the most common way to manufacture soft actuators is to cast silicone in custom-designed molds. This is a slow process that requires fabricating a mold and waiting for the silicone rubber to cure. This process can take hours or even days.
Further, programming specific bending behaviors is non-intuitive, and integrating sensing requires special care in the casting process. PneuAct presents a method for using machine knitting to achieve the same-ends. Using a programmable knitting-machine and off-the-shelf components, PneuAct's method allows users to design custom bending actuators with integrated sensing in less than an hour and with very low material cost (a few dollars). We believe PneuAct has the power to greatly accelerate soft actuator design-and-fabrication cycles, to present a new standard way for rapidly prototyping them, and to spotlight machine textiles as part of the future of soft robotics.


