

Roamer 2, the Almost Living Robot Pet
By Michael Rigsby
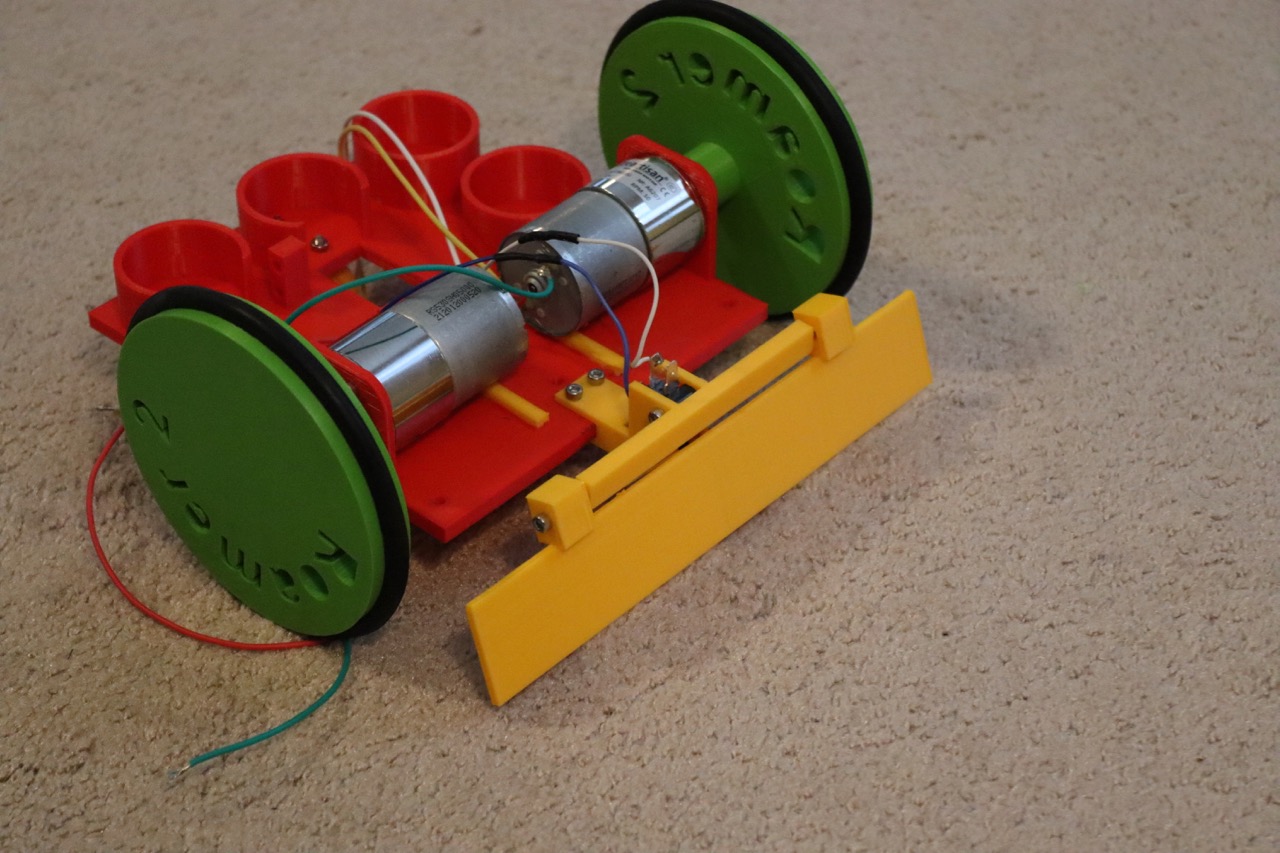
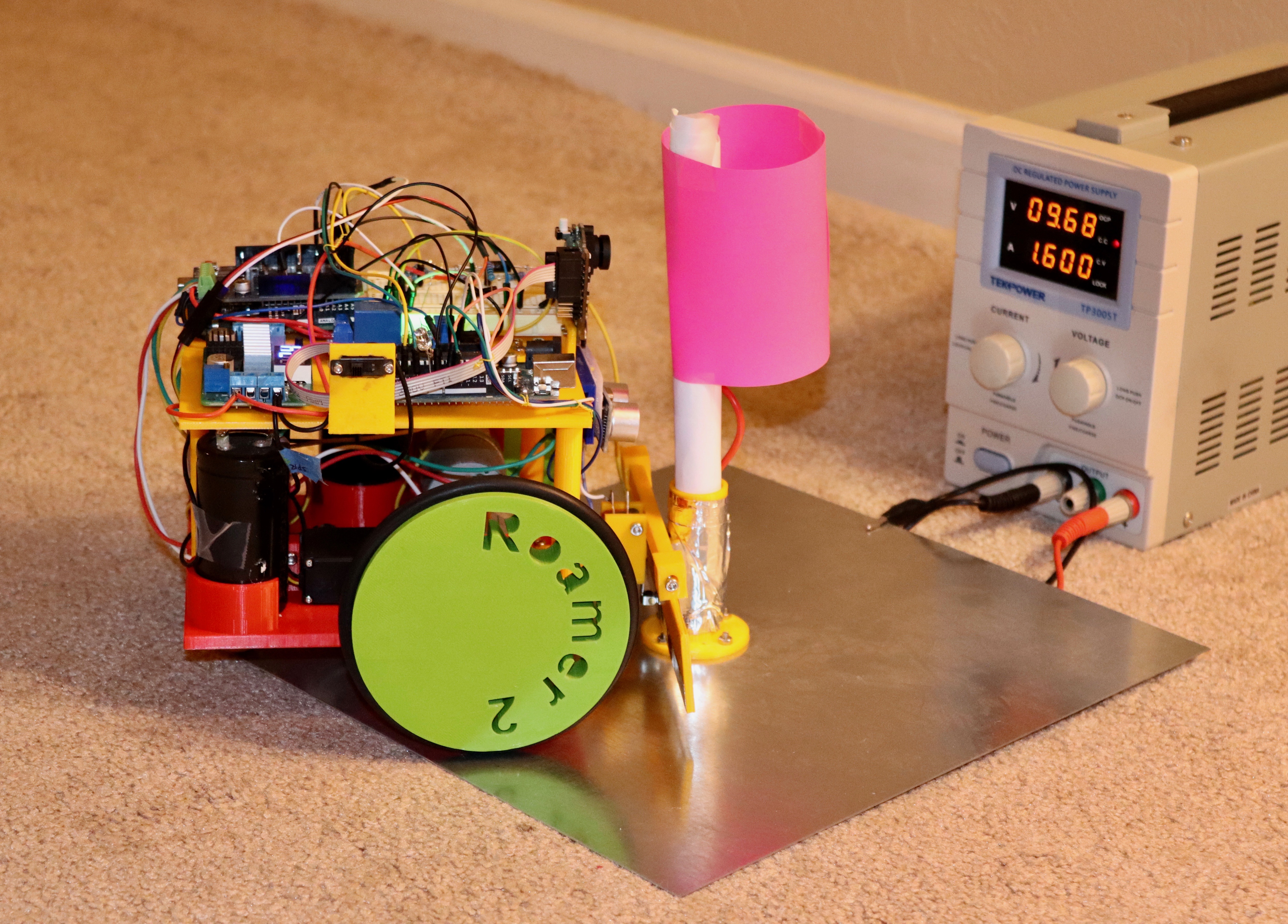
Roamer 2, powered by capacitors, wanders about and recharges herself.
Type: Artistic
Website: https://www.instructables.com/Roamer-2-the-Pet-Robot/


What inspired you or what is the idea that got you started?
I've always wanted a pet robot--one that runs around and takes care of itself.
What is your project about and how does it work?
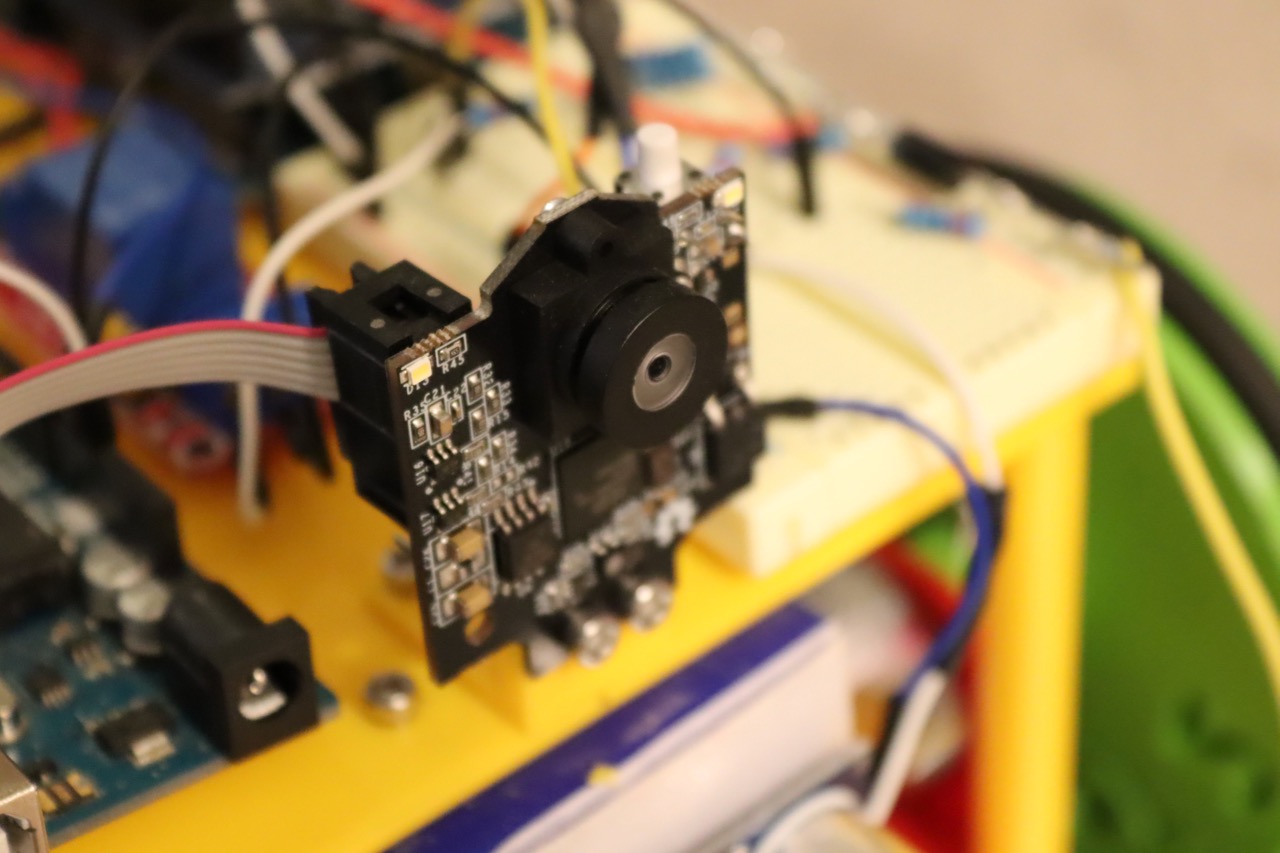
Roamer 2 wanders about, detecting objects using sonar and her front bumper. She mostly stays out of trouble. Her maximum run time is about 11 minutes, but she starts hunting her charger (using a Pixy camera and Arduino) after 4 minutes. Charge time is around two minutes.
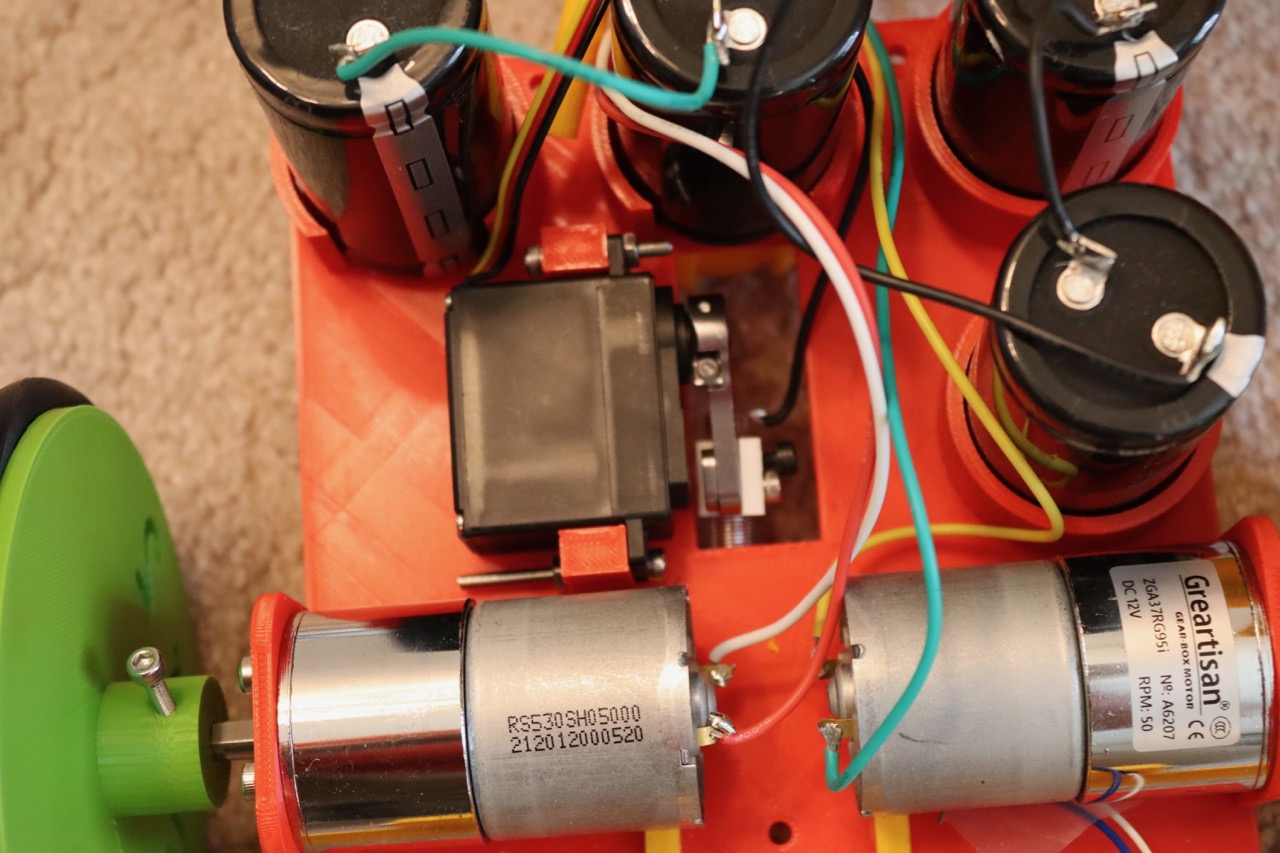
Because she is powered by super capacitors, she can charge and discharge tens of thousands of times (at most any rate) without degradation of the capacitors.
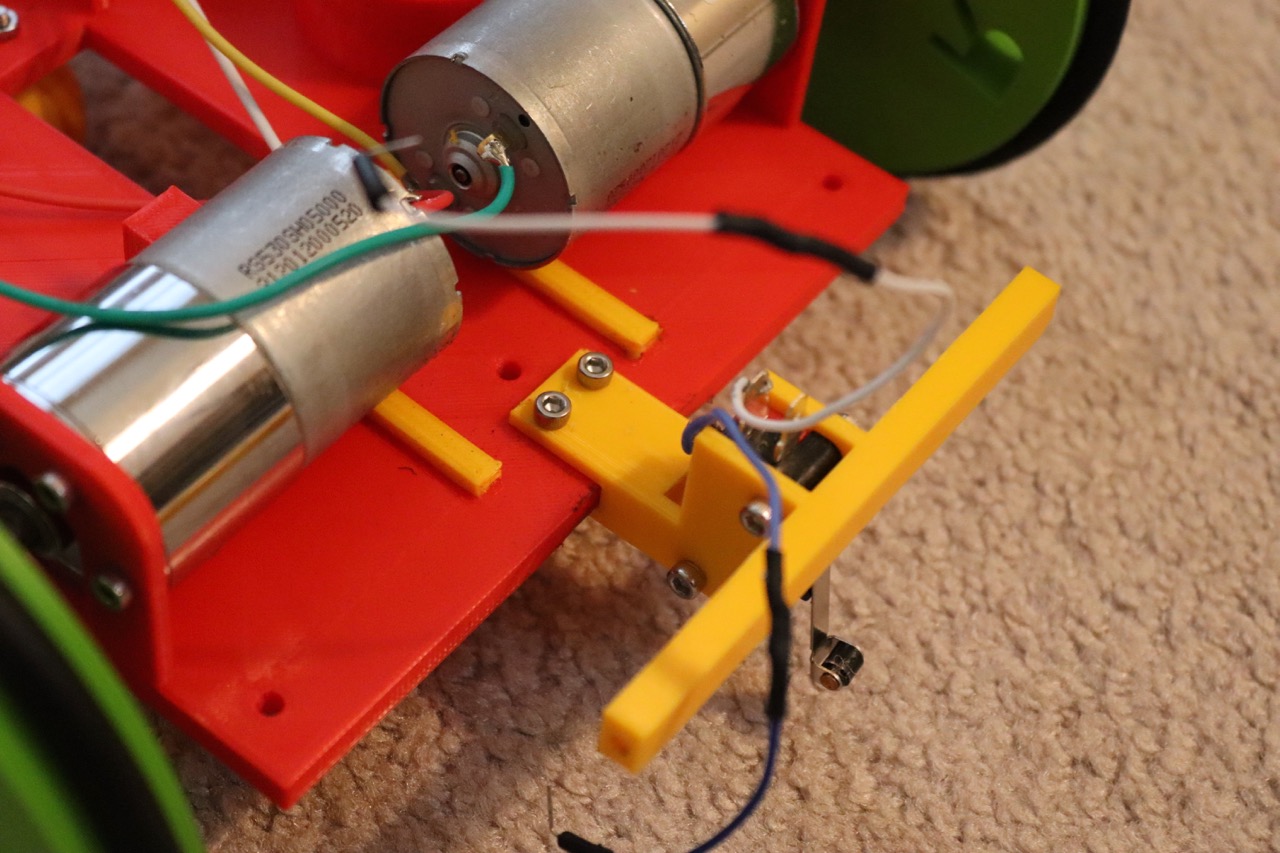
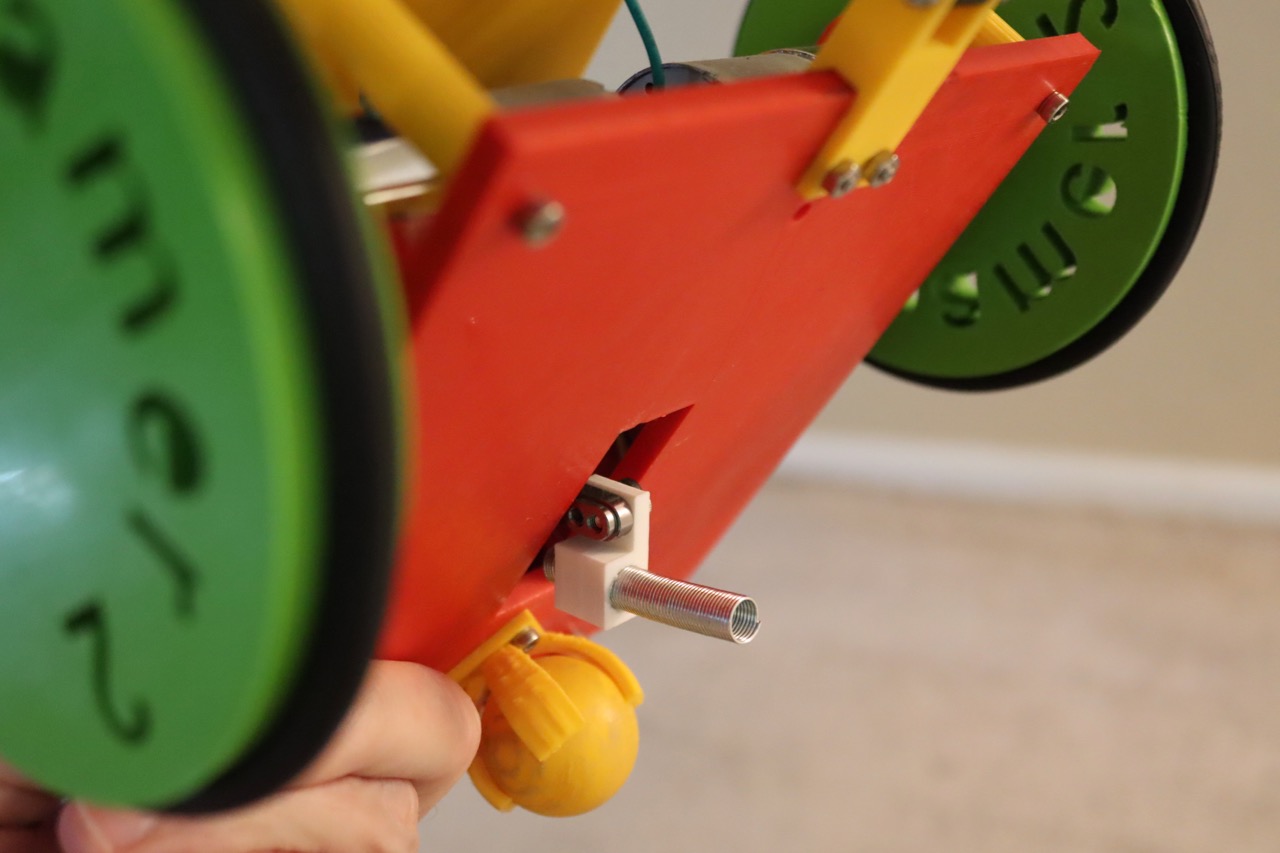
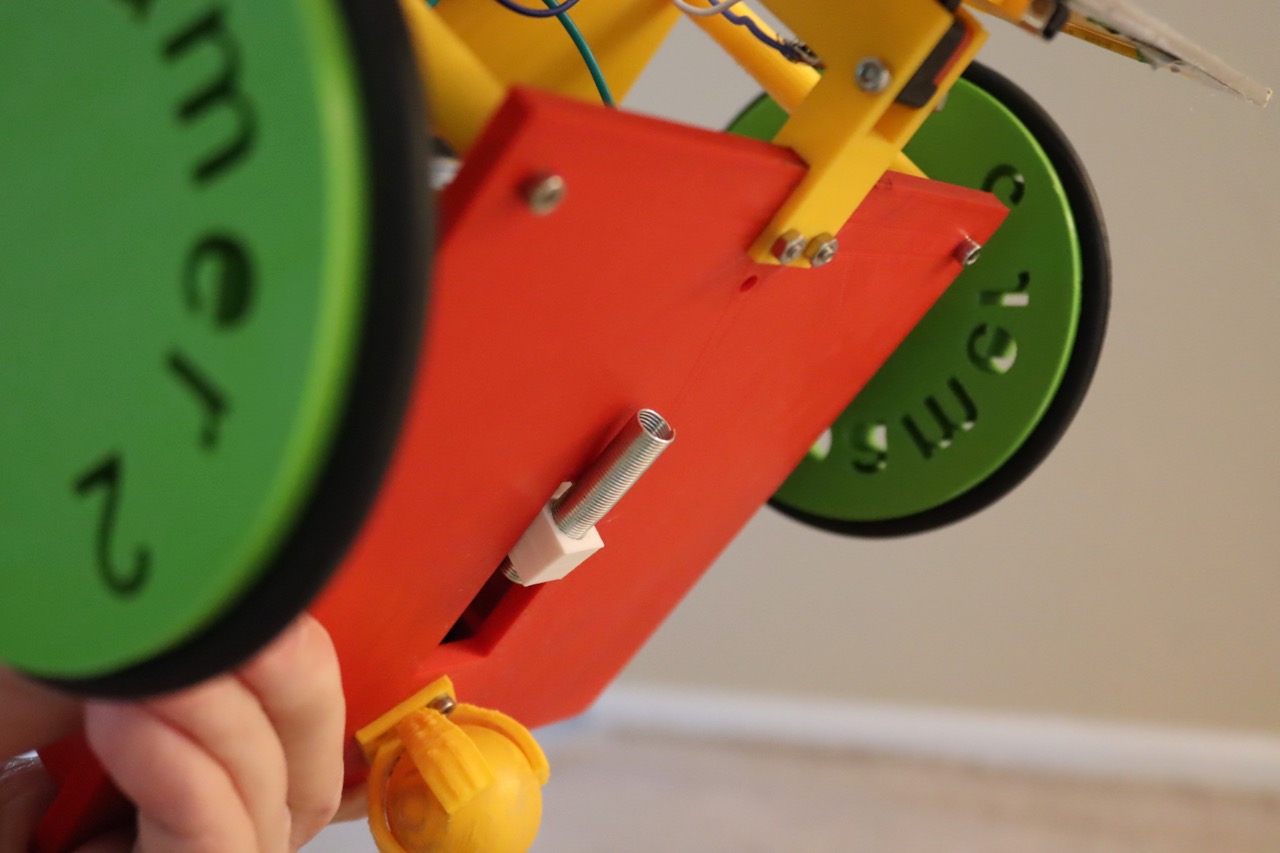
The charging station is a 12" x 12" metal plate with a pole in the center. Roamer 2's front bumper contacts the pole and a spring (lowered by a servo motor) contacts the metal plate. A bench power supply, set at 12 volts (max) and 1.6 amps (max) supplies the energy.
She wanders around my room, feeds herself and leaves no droppings. What more could you want?
What did you learn by doing this project?
I learned how to build a simple charging station.
The first version did nothing but run around, powered by capacitors--no self charging.
The second version wandered about, always searching for the charging station, but only finding it by random luck. Her spring (on the bottom) was always extended and tended to collect "fuzz" from the carpet--impeding her ability to make electrical contact.
The current version actively searches for the charger at a specified charge level.
What impact does your project have on others as well as yourself?
This project allows high mobility (never stopped more than a couple of minutes on the charger) as well as a simple method of creating a charging station.
It sort of realizes my dream of building a robot that functions similar to a pet turtle (or pet ant).


